2tom047
3. APARATY ELEKTRYCZNE 96
przy czym: c — stała zależna od stanu powierzchni styków (tabl. 3.2); F — siła docisku; fi — stała zależna od rodzaju zestyku (płaszczyznowy fi = 1,0; liniowy fi = 0,7; punktowy fi = 0,5).
Nagrzewanie zestyków w warunkach ustalonych
Nagrzanie zestyków jest zależne od ich ukształtowania, materiału, stanu powierzchni oraz ukształtowania elementów sąsiadujących, warunków odbioru ciepła.
Odpowiednie zależności ilościowe są wyznaczone przede wszystkim w odniesieniu do zestyku punktowego; dla innych rodzajów zestyków mogą one stanowić jedynie informację przybliżoną.
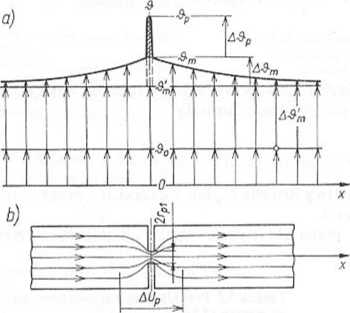
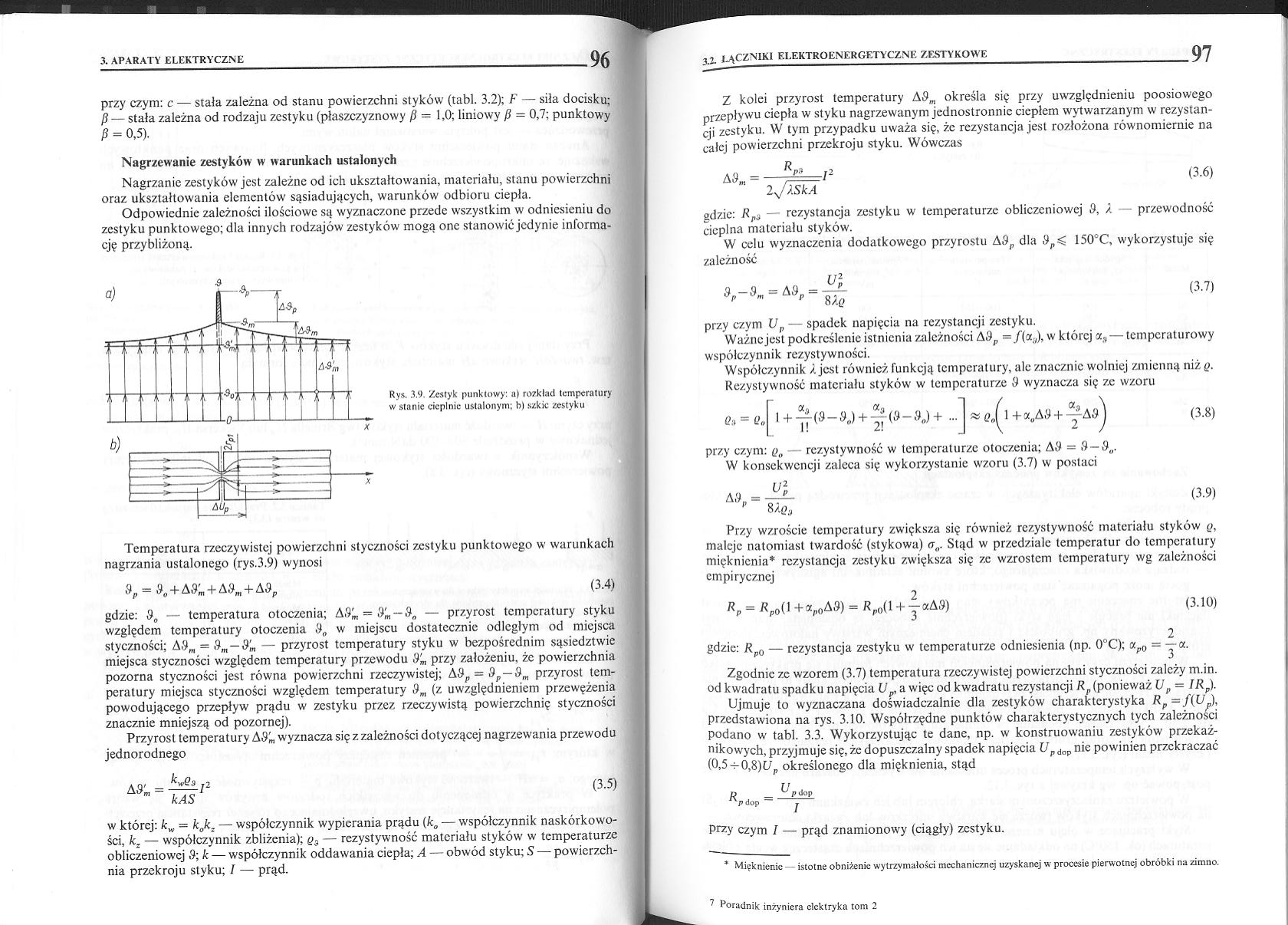
Rys. 3.9. Zestyk punktowy: a) rozkład temperatury w stanic cieplnie ustalonym; h) szkic zestyku
Temperatura rzeczywistej powierzchni styczności zestyku punktowego w warunkach nagrzania ustalonego (rys.3.9) wynosi
Sp = 90+A^ + A9m + A9p (3.4)
gdzie: — temperatura otoczenia; A.9;„ = % — .9„ — przyrost temperatury styku
względem temperatury otoczenia w miejscu dostatecznie odległym od miejsca styczności; A9m = ,9m — 9'm — przyrost temperatury styku w bezpośrednim sąsiedztwie miejsca styczności względem temperatury przewodu !)'m przy założeniu, że powierzchnia pozorna styczności jest równa powierzchni rzeczywistej; ASp = Dm przyrost temperatury miejsca styczności względem temperatury 9m (z uwzględnieniem przewężenia powodującego przepływ prądu w zestyku przez rzeczywistą powierzchnię styczności znacznie mniejszą od pozornej).
Przyrost temperatury A3^ wyznacza się z zależności dotyczącej nagrzewania przewodu jednorodnego
A 9' =
kwGa j2 kAS
(3-5)
w której: k„ = k„k. — współczynnik wypierania prądu (k„ — współczynnik naskórkowo-ści, k. — współczynnik zbliżenia); q3 — rezystywność materiału styków w temperaturze obliczeniowej .9; k — współczynnik oddawania ciepła; A — obwód styku; S — powierzchnia przekroju styku; I — prąd.
Z kolei przyrost temperatury ASm określa się przy uwzględnieniu poosiowego przepływu ciepła w styku nagrzewanym jednostronnie ciepłem wytwarzanym w rezystancji zestyku. W tym przypadku uważa się, że rezystancja jest rozłożona równomiernie na całej powierzchni przekroju styku. Wówczas gdzie: R:,:t — rezystancja zestyku w temperaturze obliczeniowej 9, /. — przewodność cieplna materiału styków'.
W celu wyznaczenia dodatkowego przyrostu ARp dla Rp^ 150°C, wykorzystuje się zależność przy czym Up — spadek napięcia na rezystancji zestyku.
Ważne jest podkreślenie istnienia zależności ARp — f(aj, w której a., — temperaturowy współczynnik rezystywności.
Współczynnik ż jest również funkcją temperatury, ale znacznie wolniej zmienną niż tj. Rezystywność materiału styków w temperaturze R wyznacza się ze wzoru

(3.8)
przy czym: q„ rezystywność w temperaturze otoczenia; AR = R — R„. W konsekwencji zaleca się wykorzystanie wzoru (3.7) w postaci
(3-9)
Przy wzroście temperatury zwiększa się również rezystywność materiału styków o, maleje natomiast twardość (stykowa) rr„. Stąd w przedziale temperatur do temperatury mięknicnia1 rezystancja zestyku zwiększa się ze wzrostem temperatury wg zależności empirycznej

(3.10)
gdzie: Rp0 — rezystancja zestyku w temperaturze odniesienia (np. 0°C); ap0 = — a.
Zgodnie ze wzorem (3.7) temperatura rzeczywistej powierzchni styczności zależy m.in. od kwadratu spadku napięcia Up, a więc od kwadratu rezystancji Rp (ponieważ Up = IRp).
Ujmuje to wyznaczana doświadczalnie dla zestyków charakterystyka Rp = f(Up), przedstawiona na rys. 3.10. Współrzędne punktów charakterystycznych tych zależności podano w tabl. 3.3. Wykorzystując te dane, np. w konstruowaniu zestyków przekaźnikowych, przyjmuje się, że dopuszczalny spadek napięcia Up<jop nic powinien przekraczać (0,5^0,8)17,, określonego dla mięknienia, stąd
TJ
^ p dop
% dop--j
przy czym / — prąd znamionowy (ciągły) zestyku.
Mięknienic — istotne obniżenie wytrzymałości mechanicznej uzyskanej w procesie pierwotnej obróbki na zimno.
■' Poradnik inżyniera elektryka tom 2
Wyszukiwarka
Podobne podstrony:
2tom049 3. APARATY ELEKTRYCZNE 100 Rys. 3.15. Przykładowa zależność od czasu temperatury miejsc styc
2tom060 3. APARATY ELEKTRYCZNE 122 ników dobiera się w zależności od charakteru pracy i narażeń środ
500 (6) 13. Prądy i elektromagnetyczne momenty obrotowe maszyny (•3.38) przy czym impedancja maszyny
Nr 9PRZEGLĄD ELEKTROTECHNICZNY 233 stałą, zależną od rocznej mocy szczytowej lub mocy do niej zbliżo
3tom103 3. SIECI ELEKTROENERGETYCZNE 208 przy czym: gu 92 — ciężary jednostkowe przewodu uwzględniaj
3tom109 3. SIECI ELEKTROENERGETYCZNE 220 przy czym: Pu — udział mocy elementu zasilanego (obciążenie
mom sr przy i sinu Msv moment średni c - stała zależna od silnika im - średnia wartość strumi
momentel M=c$I M- moment elektromagnetyczny c - stała zależna od silnika i - strumień wirujący&
momentodu M=cU2 M- moment elektromagnetyczny c - stała zależna od silnika U - napięcie zasilani
fizyczna3 1 Punkty: 0/1 N204 rozkłada się w reakcji N204 = 2N02, przy czym stała równowagi tej reakc
382 (14) 382 10. Obliczanie parametrów obwodów elektrycznych maszyn przy czym k kolejna liczba natur
386 (12) 386 10. Obliczania parametrów obwodów elektrycznych maszyn. przy czym: t, — podziałka żłobk
388 (15) 388 10. Obliczanie parametrów obwodów elektrycznych maszyn. przy czym:(I0.89c) oraz <1*.
398 (12) 2gg W. Obliąanie parametrów obwodów elektrycznych maszyn... przy czym ę&g
406 (9) 406 10. Obliczanie parametrów obwodów elektrycznych maszynli ł-1 przy czym: p — liczba par b
2tom042 3. APARATY ELEKTRYCZNE 86 Siły i momenty wywołane działaniem prądów zwarciowych występują po
więcej podobnych podstron