2tom214
5. MASZYNY ELEKTRYCZNE 430
5. MASZYNY ELEKTRYCZNE 430
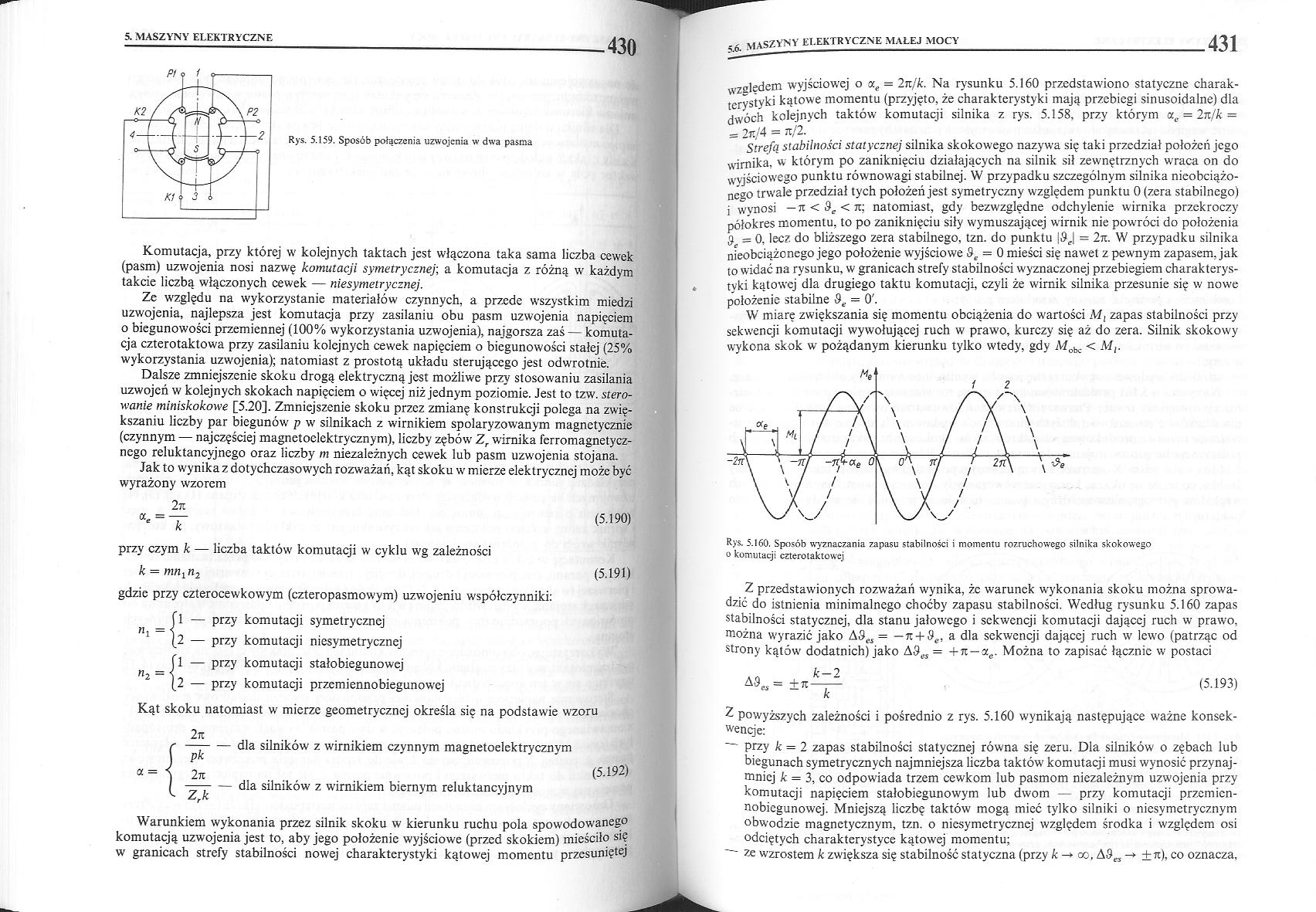
Rys. 5.159. Sposób połączenia uzwojenia w dwa pasma
Komutacja, przy której w kolejnych taktach jest włączona taka sama liczba cewek (pasm) uzwojenia nosi nazwę komutacji symetrycznej; a komutacja z różną w każdym takcie liczbą włączonych cewek — niesymetrycznej.
Ze względu na wykorzystanie materiałów czynnych, a przede wszystkim miedzi uzwojenia, najlepsza jest komutacja przy zasilaniu obu pasm uzwojenia napięciem o biegunowości przemiennej (100% wykorzystania uzwojenia), najgorsza zaś — komutacja czterotaktowa przy zasilaniu kolejnych cewek napięciem o biegunowości stałej (25% wykorzystania uzwojenia); natomiast z prostotą układu sterującego jest odwrotnie.
Dalsze zmniejszenie skoku drogą elektryczną jest możliwe przy stosowaniu zasilania uzwojeń w kolejnych skokach napięciem o więcej niż jednym poziomie. Jest to tzw. sterowanie miniskokowe [5.20], Zmniejszenie skoku przez zmianę konstrukcji polega na zwiększaniu liczby par biegunów' p w silnikach z wirnikiem spolaryzowanym magnetycznie (czynnym — najczęściej magnetoclcktrycznym), liczby zębów Zr wirnika ferromagnetycznego reluktancyjnego oraz liczby m niezależnych cewek lub pasm uzwojenia stojana.
Jak to wynika z dotychczasowych rozważań, kąt skoku w mierze elektrycznej może być wyrażony wzorem

(5.190)
(5.191)
przy czym k — liczba taktów komutacji w cyklu wg zależności k = mnin2
gdzie przy czterocewkowym (czteropasmowym) uzwojeniu współczynniki:
1 — przy
2 — przy 1 — przy .2 — przy
»i
komutacji symetrycznej komutacji niesymetrycznej komutacji stałobiegunowej komutacji przemiennobiegunowej
Kąt skoku natomiast w mierze geometrycznej określa się na podstawie wzoru
2it
--dla silników z wirnikiem czynnym magnetoelektrycznym
(5.192)
pk
a =
2k
— dla silników z wirnikiem biernym reluktancyjnym
Warunkiem wykonania przez silnik skoku w kierunku ruchu pola spowodowanego komutacją uzwojenia jest to, aby jego położenie wyjściowe (przed skokiem) mieściło się w granicach strefy stabilności nowej charakterystyki kątowej momentu przesuniętej ,6 MłS/V>V KI.EKTRYCZNE MALEJ MOCY
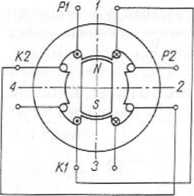
vznledem wyjściowej o oce = 2n/k. Na rysunku 5.160 przedstawiono statyczne charakterystyki kątowe momentu (przyjęto, że charakterystyki mają przebiegi sinusoidalne) dla dwóch kolejnych taktów komutacji silnika z rys. 5.158, przy którym ae = 2n/k — -= 2«/4 = tt/2.
Strefą stabilności statycznej silnika skokowego nazywa się taki przedział położeń jego wirnika, w którym po zaniknięciu działających na silnik sił zewnętrznych wraca on do wyjściowego punktu równowagi stabilnej. W przypadku szczególnym silnika nieobciążo-neao trwale przedział tych położeń jest symetryczny względem punktu 0 (zera stabilnego) i wvnosi — natomiast, gdy bezwzględne odchylenie wirnika przekroczy
półókres momentu, to po zaniknięciu siły wymuszającej wirnik nie powróci do położenia 3=0, lecz do bliższego zera stabilnego, tzn. do punktu |3J = 2k. W przypadku silnika nieobciążonego jego położenie wyjściowe Se = 0 mieści się nawet z pewnym zapasem, jak to widać na rysunku, w granicach strefy stabilności wyznaczonej przebiegiem charakterystyki kątowej dla drugiego taktu komutacji, czyli że wirnik silnika przesunie się w nowe położenie stabilne 3,. = 0'.
W miarę zwiększania się momentu obciążenia do wartości M, zapas stabilności przy sekwencji komutacji wywołującej ruch w prawo, kurczy się aż do zera. Silnik skokowy wykona skok w pożądanym kierunku tylko wtedy, gdy Mobc < M,.
2
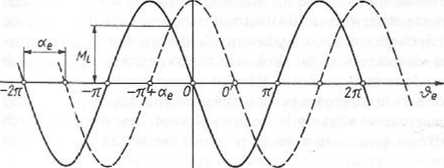
Rys. 5.160. Sposób wyznaczania zapasu stabilności i momentu rozruchowego silnika skokowego u komutacji czterotaktowej
Z przedstawionych rozważań wynika, że warunek wykonania skoku można sprowadzić do istnienia minimalnego choćby zapasu stabilności. Według rysunku 5.160 zapas stabilności statycznej, dla stanu jałowego i sekwencji komutacji dającej ruch w prawo, można wyrazić jako A3CS = — tt + 3e, a dla sekwencji dającej ruch w lewo (patrząc od strony kątów dodatnich) jako Aćł^ = -fn—3te. Można to zapisać łącznic w postaci
(5.193)
wencje:
Z powyższych zależności i pośrednio z rys. 5.160 wynikają następujące ważne konsek-
przy k = 2 zapas stabilności statycznej równa się zeru. Dla silników o zębach lub biegunach symetrycznych najmniejsza liczba taktów komutacji musi wynosić przynajmniej k = 3, co odpowiada trzem cewkom lub pasmom niezależnym uzwojenia przy komutacji napięciem stalobicgunowym lub dwom — przy komutacji przcmicn-nobiegunowej. Mniejszą liczbę taktów mogą mieć tylko silniki o niesymetrycznym obwodzie magnetycznym, tzn. o niesymetrycznej względem środka i względem osi odciętych charakterystyce kątowej momentu;
ze wzrostem k zwiększa się stabilność statyczna (przy k -» oo, A3„ -> ±7t), co oznacza,
Wyszukiwarka
Podobne podstrony:
2tom149 5. MASZYNY ELEKTRYCZNE 300 Rys. 5.38. Schemat połączeń uzwojeń indukcyjnego regulatora
2tom190 5. MASZYNY ELEKTRYCZNE 382 Rys. 5.113. Układ połączeń silnika bocznikowego Rys. 5.114. Kszta
2tom192 5. MASZYNY ELEKTRYCZNE 386 Rys. 5.119. Sposoby magnesowania magnesów segmentowych i pierście
3tom204 6. GOSPODARKA ELEKTROENERGETYCZNA 410 6. GOSPODARKA ELEKTROENERGETYCZNA 410 Rys. 6.11. Sposó
pkm osinski�72 142 2. Połączenia elementów maszyn al b) cl Rys. 2-55 Przykłady połączeń spoczynkowyc
2.6. Rodzaje maszyn Sposób połączenia uzwojenia twornika i uzwojenia wzbudzającego określa nazwę
430 3 11. ELEKTROWNIE JĄDROWE 11. ELEKTROWNIE JĄDROWE Rys. 11.3. Udział procentowy W fragmentów rozs
36 (59) «• NAM50 ELEKTRYCZNY MASZYNY Jak pokazuje rys. 61. ulnik Ą jest przykręcony dwoma wkrętami B
2tom124 5. MASZYNY ELEKTRYCZNE 250 5. MASZYNY ELEKTRYCZNE 250 Rys. 5.8. Schemat zastępczy maszyny in
2tom130 5. MASZYNY ELEKTRYCZNE 262 Rys. 5.16. Stopień obciążenia kp silnika w zależności od względne
2tom152 5. MASZYNY ELEKTRYCZNE 306 Rys. 5.45. Charakterystyki kątowe maszyny z cylindrycznym wirniki
2tom156 S. MASZYNY ELEKTRYCZNE 314 S. MASZYNY ELEKTRYCZNE 314 Rys. 5.51. Układ wzbudzenia turbogener
2tom159 5. MASZYNY ELEKTRYCZNE 320 5. MASZYNY ELEKTRYCZNE 320 Rys. 5.62. Wyznaczanie prądu wzbudzeni
2tom183 5. MASZYNY ELEKTRYCZNE 368 Rys. 5.103. Charakterystyka zewnętrzna U = /(/) prądnicy 1 obcowz
2tom198 S. MASZYNY ELEKTRYCZNE 398 Rys. 5.131. Układ nadążny W— wzmacniacz, SW— silnik wykonawczy, p
2tom201 5. MASZYNY ELEKTRYCZNE 404 Rys. 5.137. Zasada konstrukcji podstawowych odmian prądnic tachom
2tom206 5. MASZYNY ELEKTRYCZNE 414 Rys. 5.144. Rodziny charakterystyk mechanicznych m = /(v) (linia
2tom209 5. MASZYNY ELEKTRYCZNE 420 Rys. 5.150. Charakterystyki mechaniczne (a) i sterowania (b):_amp
2tom210 5. MASZYNY ELEKTRYCZNE 422 (tzw. kąt histerezy) o jaki pierwsza harmoniczna strumienia opóźn
więcej podobnych podstron