319
319
b)
120°t1°
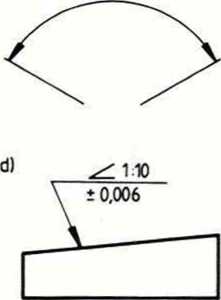
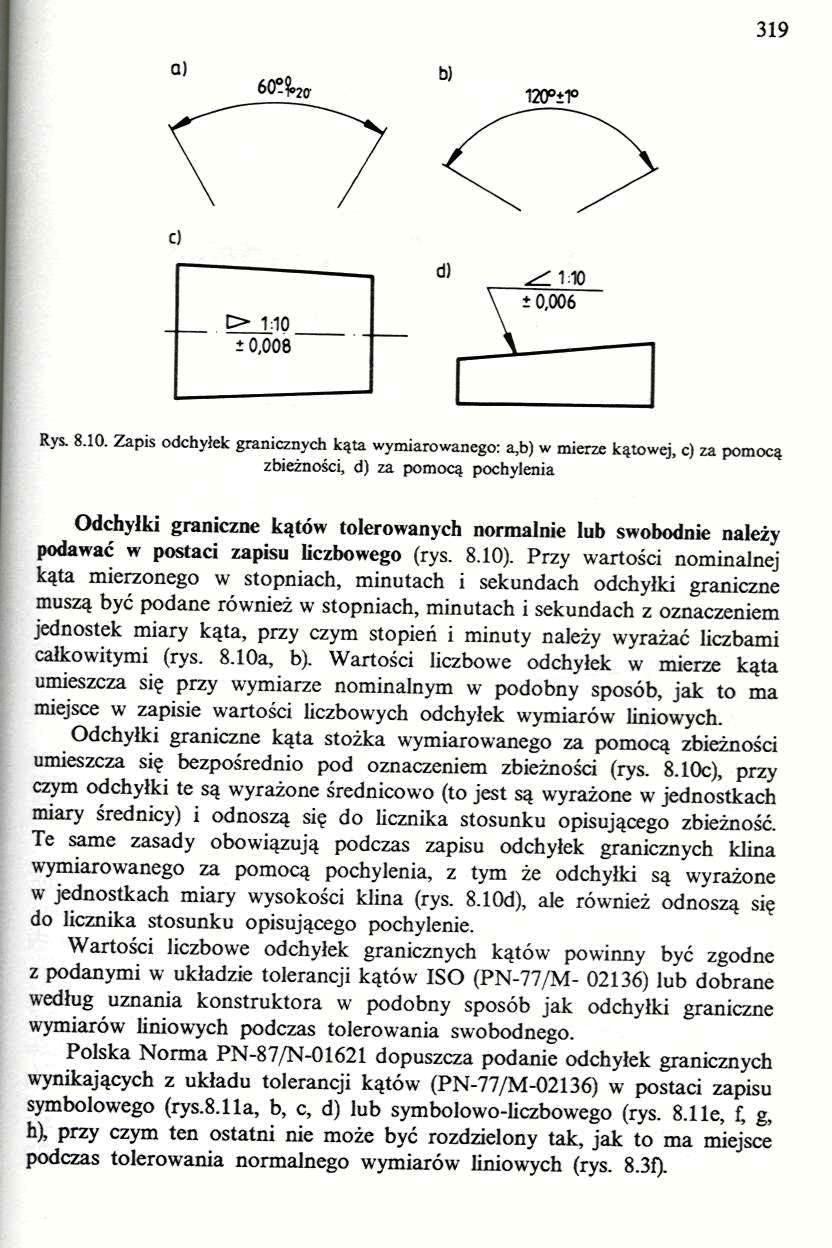
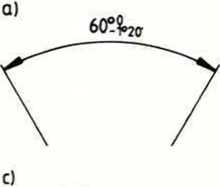
Rys, 8.10. Zapis odchyłek granicznych kąta wymiarowanego: a,b) w mierze kątowej, c) za pomocą zbieżności, d) za pomocą pochylenia
Odchyłki graniczne kątów tolerowanych normalnie lub swobodnie należy podawać w postaci zapisu liczbowego (rys. 8.10). Przy wartości nominalnej kąta mierzonego w stopniach, minutach i sekundach odchyłki graniczne muszą być podane również w stopniach, minutach i sekundach z oznaczeniem jednostek miary kąta, przy czym stopień i minuty należy wyrażać liczbami całkowitymi (rys. 8.10a, b). Wartości liczbowe odchyłek w mierze kąta umieszcza się przy wymiarze nominalnym w podobny sposób, jak to ma miejsce w zapisie wartości liczbowych odchyłek wymiarów liniowych.
Odchyłki graniczne kąta stożka wymiarowanego za pomocą zbieżności umieszcza się bezpośrednio pod oznaczeniem zbieżności (rys. 8.10c), przy czym odchyłki te są wyrażone średnicowo (to jest są wyrażone w jednostkach miary średnicy) i odnoszą się do licznika stosunku opisującego zbieżność. Te same zasady obowiązują podczas zapisu odchyłek granicznych klina wymiarowanego za pomocą pochylenia, z tym że odchyłki są wyrażone w jednostkach miary wysokości klina (rys. 8.10d), ale również odnoszą się do licznika stosunku opisującego pochylenie.
Wartości liczbowe odchyłek granicznych kątów powinny być zgodne z podanymi w układzie tolerancji kątów ISO (PN-77/M- 02136) lub dobrane według uznania konstruktora w podobny sposób jak odchyłki graniczne wymiarów liniowych podczas tolerowania swobodnego.
Polska Norma PN-87/N-01621 dopuszcza podanie odchyłek granicznych wynikających z układu tolerancji kątów (PN-77/M-02136) w postaci zapisu symbolowego (rys.8.11a, b, c, d) lub symbolowo-liczbowego (rys. 8.1 le, f, g, h), przy czym ten ostatni nie może być rozdzielony tak, jak to ma miejsce podczas tolerowania normalnego wymiarów liniowych (rys. 8.3f).
Wyszukiwarka
Podobne podstrony:
320 Rys. 8.11. Zapis symbolowy tolerancji kąta wyrażonego: a,b) w mierze kątowej, c) przez zbieżność
Image 120 123 Rys. 5.10. Pneumatyczne, elastyczne końcówki chwytaka robota [26] W rozwiązaniach stos
Przechwytywanie15 W)Ra6^(V)h (t>") Rys. 9.7.10. Podkładki zębate Tabl. 9.7.6. Podstawowe wym
SL731751 j.6.0«S0j. Rys. 4.10. Schemat żurawia wieżowego ZB-120 * * vaozĄ Hys. 4.1
SL731751 j.6.0«S0j. Rys. 4.10. Schemat żurawia wieżowego ZB-120 * * vaozĄ Hys. 4.1
212 213 212t l 4 I K U (MU » »t Rys. 5.102. 10-bitowy konwerter liczb dwójkowych na BCD wykorzystują
CCF20121215�39 55 O 00000001010 11010100100011001100110010000000000000000000000 Rys. 2.10. Przykład
i i X /K ! i T” N 1 *k > x Rys. 155 Rys. 156 10.4.
24848 Strona 120 Układ kierowniczy Rys. 3.10. Ustawienie czaszy przegubu i wału kierownicy 28a — gór
369 rysunkowej lub od prawej strony arkusza rysunkowego (rys. 10.6e). W obszarze, w którym zapis lic
więcej podobnych podstron