DSCN9730
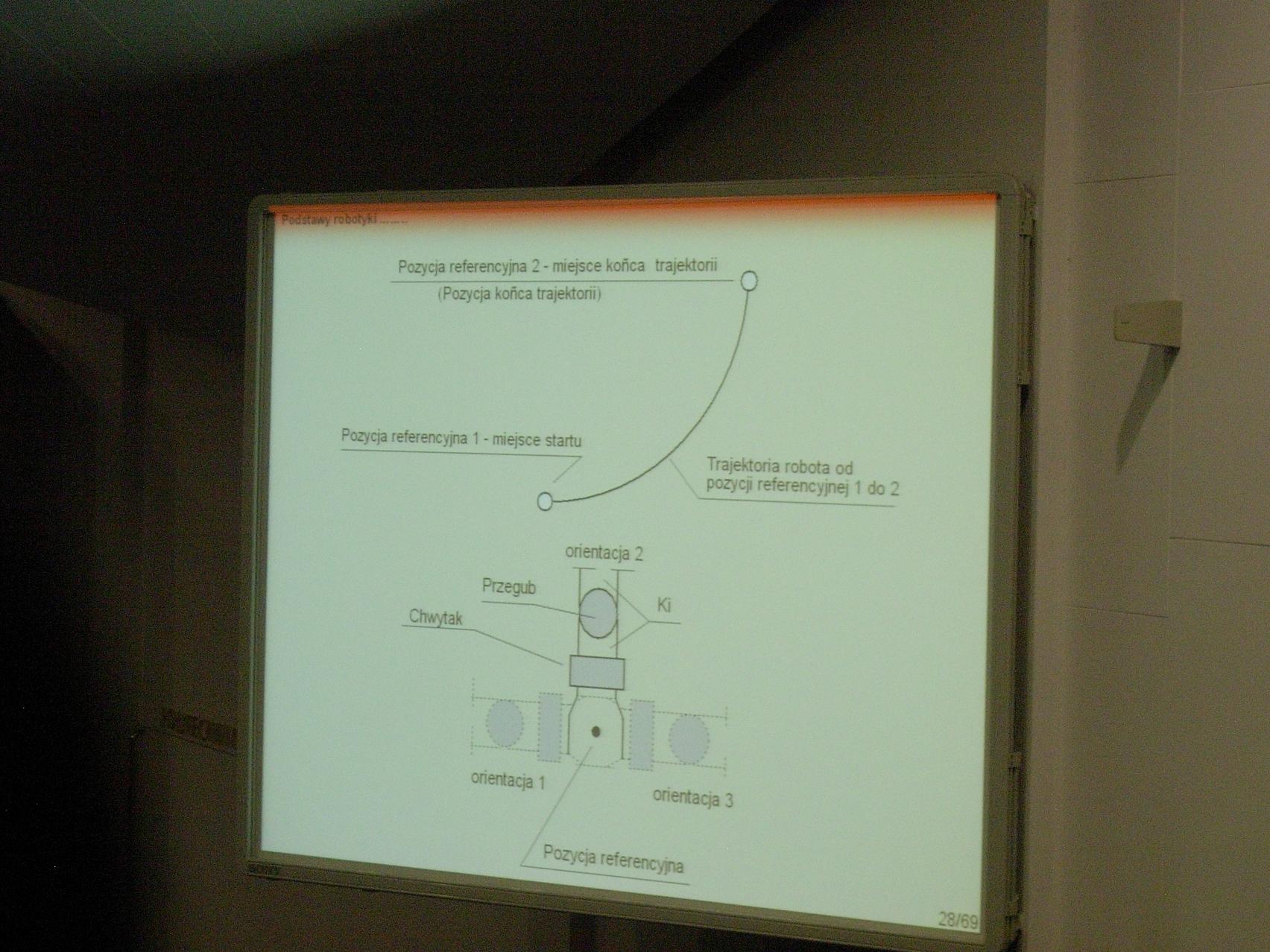
Pozycja referencyjna 2 - miejsce końca trajektorii (Pozycja końca trajektorii)
Pozycja referencyjna 1 - miejsce startu
l rajektoria robota od pozycji referencyjnej 1 do 2
orientacja 2
orientacja 1 / orientacja 3
Pozycja referencyjna
Wyszukiwarka
Podobne podstrony:
Image 29 33 Pozycja referencyjna 2 - miejsce końca trajektorii (Pozycja końca trajektorii) Pozycja r
DSCN9729 Pozycjonowanie robota - sterowanie przemieszczeniem tzw punktu charakterystycznego związane
5. do końca okresu sprawozdawczego. Jest ono wykazywane w pasywach bilansu pod pozycją „Inne rozlicz
DSCN9913 trajektorii Końca trajektorii» Pozyeja referencyjna 1 - rrieiscs Trajektoria
612 Schorowany tygrys, 1949-1953 końca. Zachowując dla siebie pozycję najwyższego kapłana
Kodowanie informacji Układy cyfrowe 27 Przeliczaną liczbę binarną dzielimy od końca (czyli od najmło
h h 15, UniwersytetŁÓDZKI Miejsce zamieszkania Do końca 2006 r. brak definicji miejsca zamieszkania
img053 Strategia OneToOne to: • definiuje miejsce otwarcia pozycji •
miejsce ofiary esteś i !qj To miejsce pozostanie na tym obszarze do końca gry. Wyznawcy Smoczeg
prawidłową pozycją za biurkiem. Pozwala uniknąć zaburzeń na miejscu pracy. Oprogramowanie to może po
European Cities Monitor Pierwsze miejsce Pozycja Warszawy Najlepsze miasta Europy do
gielda 2 termin 09 (2) i- iMmakalna u jednego z rodzicówl’ 1 ANIE
412 (2) •HJUANIP •HJUANIP Po***,Krok 4. PrzeJścJ* do drugiej pozycji Zamień się miejscami z drugą
15Lotnik i Automobilista sur-Saóne, zbadać pozycje wojsk na tych placówkach i w miejscowościach
wstrzyknięcia 4 Ryc. 12b. Miejsce wkłucia według metody Sachtlebena po stronie lewej (pozycja przed
więcej podobnych podstron