DSCN9729

Pozycjonowanie robota - sterowanie przemieszczeniem tzw punktu charakterystycznego związanego z kiścią robota, chwytakiem łub narzędziem maszyny manipulacyjnej przez doprowadzenie zespołów ruchu jednostki kinematycznej do zadanych położeń
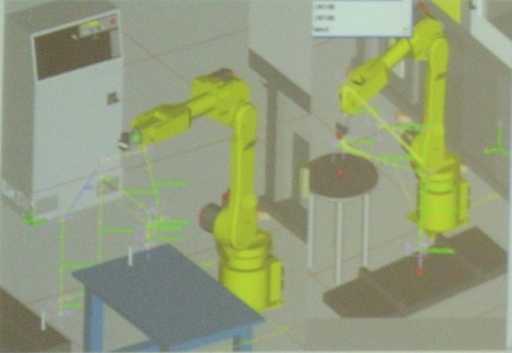
Rys. 10 Pozycjonowanie - pi
rTBBrn
Wyszukiwarka
Podobne podstrony:
Image 28 32 Położenie środka ogniwa roboczego (kiści), tzw. punktu charakterystycznego ostatniego el
DSCN9911 cPSrrnie r°b0ta Isterawanie Pomieszczeniem R punktu 690 zwiazane9° z kiścią robota, chwytak
DSCN9732 Programowanie robota - ustalenie algorytmu pracy robota przez wprowadzenie do pamięci jego
Wszystkie przeguby robota są to przeguby V klasy, obrotowe, tak samo w pozycjonerze. Układ sterowaln
4 Sterowanie wykorzystujące tzw. logikę rozmytą lub sterowniki programowalne PLC stosowane jest w uk
Badanie elementów układów automatycznego sterowania Na rys. 4 pokazano charakterystykę sterowania
SDC13040 Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu
InżynieriaMateriałowa 7.1.2. Przemiana martenzytyczna Przemiana martenzytyczna ma charakter bezdyfuz
12 Obwody elektryczne prądu przemiennego trójfazowego: Wielkości charakterystyczne i ich zależności.
otrzymujemy • A PI i-i- r - 0 16 5 2 U- Stąd równanie określające przemieszczenie dowolnego punktu
Mechanizm przemiany bainitycznej Przemiana bainityczna ma charakter mieszany: bezdyfuzyjny i
zji sytuacyjnych, licznych porównań tzw. homeryckich i charakterystycznych dla epiki starożytnej „hi
wytrzymka (1) W-zkcb w Zadanie 1 Wyznaczyć przemieszczenie pionowe punktu K1 2T -7—JL Zadanie 2 W pł
z7 prz1 Obliczyć przemieszczenie pionowe punktu. C i kąt obrotu przekroju, przy podporze A. 4GE J Me
więcej podobnych podstron