IMG155

- transportowe, przenoszące przedmioty do montażu i po
- transportowo-montażowc, na których równocześnie odbyw !•'
i montaż (ręczny, automatyczny lub mieszany). ^ W
a)

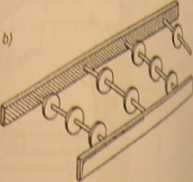
Rys 2.91. Przenośniki: a) wałkowy prosty; b) krążkowy; c) wałkowy lukowy [I, ||)
Przenośniki transportowo-montażowe mogą się poruszać w trakcie niotiiih ruchem ciągłym, jednak z niewielkimi prędkościami (0,25 - 3,5 tnfai Natomiast przenośniki krokowe poruszają się ruchem przerywanym i stosotr ne są tam, gdzie w trakcie montażu konieczne jest zatrzymywanie modro nych wyrobów w określonym miejscu - co najczęściej występuje przy im* żu automatycznym. W układach montażowych bardzo często jest wymija, aby montowane przedmioty lub wyroby były podawane nie pojedynczo ■ jeden za drugim, lecz grupowo - w specjalnych kasetach lub paletach. Zub sowanie techniki sensorowej i mikroprocesorowej umożliwia kontrolom położeniu palet, możliwe jest także rozróżnianie palet z różnymi wyrotuat przez zastosowanie odpowiednich zespołów kodujących (przeważnie nwgneft-cznych) i odczytujących, instalowanych na paletach i transporterach.
Na rysunku 2.92ą pokazano fragment systemu montażowego firmy AFAC-Niemcy. Palety transportowe I poruszają się po liniowych prowadnicach 1 j wykonanych z profili aluminiowych. Do napędu palet transportowych fj& j rzystywane są paski zębate lub łańcuch rolkowy (rys. 2.92b). Napędy n# | głównych są elektryczne, pomocnicze ruchy wykonują siłowniki pneumatyce Przenoszenie palet między przenośnikami liniowymi polega na zepchnięciu pkl przez zderzaki obrotowe pracujące w modułach obrotowych 3. Powrót p transportowych 1 umożliwiają dwa podnośniki 4, które obsługują^ montażową. Umożliwiają one opuszczenie palet na dolny pow^
Na rysunku 2.92c pokazano paletę technologiczną (i^J transportową) składającą się z korpusu 1, ramki 2 i pł^fl^OHj^
emu montażowego (Inny AFAG: a) widok systemu; b) napęd palet transpoitowych; c) paleta technologicina
Wyszukiwarka
Podobne podstrony:
23177 IMG152 Czasami istnieje możliwość podawania przedmiotów do montażu dajników, jak pokazano na r
s14 (8) foru. Po otrzymaniu wiadomości o decyzji wiadz rumuńskich transport został zawrócony do Fra
Budowa obejścia wsi Brzezna. Stadia i Podegrodzia po wale przeciwpowodziowym przystąpieniem do monta
korzystna w zastosowaniach do montażu na blacie stołu oraz do transportu materiałów lub ładunków. Fo
176 4. PODSTAWOWE OPERACJE TECHNOLOGICZNE MONTAŻU na czopy i wtłacza do oporu. Po montażu przeprowad
Definicje Przedmiot obrabiany (w skrócie PO) Proces produkcyjny - to niezbędne działania podjęte do
20 PISMO PG lu załogi. Po wtóre, że jego model jest przeznaczony do montażu bezpośrednio na pokładzi
Volkswagen Polo Zalecane miejsce montażu alarmu Obejmę przymocować do nadkola po stronie kierowcy, k
- przy przedmiotach długich znajdowril lif po jednaj etronte przenoszonego przedmiotu • używać irodk
1 9chemia (2) Destylat przenosi się dó rozdzielacza^ dodaje oic" 20 ml 20% węglanu sodowego i d
Studia podyplomowe przygotowujące do wykonywania zawodu nauczyciela przedmiotów zawodowych Żal po śm
wykonuje się w suchych dokach i transportuje wodą, a do montażu stosuje dźwigi pływające. Montaż odb
56802 IMG135 <v" Po podaniu sygnałów przez czujniki identyfikujące pierwotne p przedmiotu do
0000004 2 PRZEDMOWA DO WYDANIA DRUGIEGO Od czasu gdy książka ta wydana została po raz pierwszy, meto
więcej podobnych podstron