M035
prom „Guizzo”, który na trasie Wiochy - Sardynia przewozi icdnomzowo 'ISO pasażerów, 106 samochodów osobowych i 4 autobusy z prędkością 43 węzłów. Statek wyposażony był w pędnik typu KaMeWa o mocy 28 000 kW
Zasada działania pędników strugowodnych polega na wprowadzaniu do ich wnętrza poprzez umieszczony w dnie statku otwór wlotowy kanału (rys. 2.39d) znacznych ilości wody, która jest następnie sprężana przy użyciu pompy śmigłowej o dużej wydajności i wytłaczana przez wylot kanału, znajdujący się w rufowej części statku. Jeśli wokół wylotu zamontowana jest obrotowa dysza - spełnia ona rolę urządzenia sterującego, umożliwiającego dowolne manewry statkiem. Bieg wstecz uzyskuje się poprzez przesłonięcie wylotu dyszy specjalnymi przegrodami i skierowanie wypływającego strumienia wody w kierunku przeciwnym do kierunku ruchu.
2.3.5. Porównanie efektywności urządzeń sterowych
W niniejszym rozdziale omówione zostały podstawowe, najczęściej obecnie stosowane urządzenia sterowe i napędowo-sterowe. Niektóre z nich jeszcze kilkanaście lat temu znajdowały się na etapie prób i badań i w kilku przypadkach przyszłe zastosowania poszczególnych urządzeń nie były oczywiste. Znaczne postępy w technice i technologii produkcji elementów mechanicznych i elektrycznych pozwoliły na wprowadzenie ich do szerszego użytku i ich upowszechnienie. Również obecnie spotykane sąjuż w eksploatacji zróżnicowane urządzenia o różnych charakterystykach (jak napędy Kirstena-Boeinga, pompy strumieniowe Schottela, różne rozwiązania pędników strumieniowych czy napędy elektromagnetyczne), które nie zostały z braku miejsca szerzej omówione ale z pewnością znajdą szersze zastosowanie na statkach niedalekiej przyszłości.
Obecnie stosowane urządzenia sterowe dzielimy na aktywne (strumieniowe stery i pędni' ki) oraz pasywne (ster Beckera, Schillinga,obrotowe dysze Korta). Do pierwszej grupy należy ponadto włączyć kolumny napędowe i pędniki gondolowe. Na rys. 2.41 pokazano zależność efektywności poszczególnych typów napędu od prędkości statku. Jak widać efektyw ność sterów aktywnych wyraźnie maleje wraz ze wzrostem prędkości, podczas gdy sterów pasywnych wyraźnie wzrasta. W przedziale prędkości średnich (b) efektywność obu typów
jest podobna.
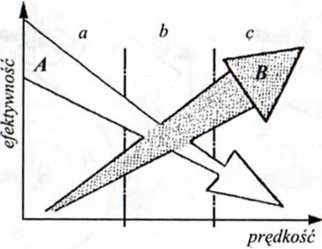
Porównanie efektywności różnych urządzeń sterowych i sterowo-napędo-wych na podstawie nakresu cyrkulacji pokazuje rysunek 2.42. Pomijając pędniki cykloidalne, umożliwiające obracanie statku w miejscu, najmniejszy promień cyrkulacji uzyskano przy użyciu cylindra obrotowego (a), a podobną średnicę zapewniają: ster aktywny Pleugera oraz pędniki AZIPOD. Nieco większy promień gwarantują umieszczone w dyszach pędniki Schottela a następnie - dysze Kortu Rys. 2.41. Efektywność sterów (A) aktywnych i (B) (b). Kolejna krzywa reprezentuje cyrku-
pasywnych w funkcji prędkości statku. lację uzyskaną przy użyciu pędników stru
gowodnych (c). Krzywe (d) i (e) wykro*
Rys. 2.42. Efektywność urządzeń sterowych - porównanie cyrkulacji wykonanej przy użyciu: a - cylindra obrotowego, b - dyszy Korta, c - pędnika strumieniowego, d -steru konwencjonalnego i strumieniowego steru dziobowego, e - steru konwencjonalnego.
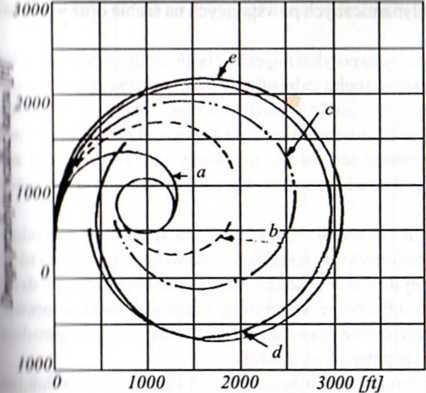
■tutti tllii statku wyposażonego w ster konwencjonalny, w przypadku (d) wspomagany dzio-t<M ■ y tu Merem strumieniowym. Jak widać konwencjonalne stery okrętowe należą do naj-Itittii 11 Icklywnych urządzeń sterowych przy znacznych manewrach; dająjednak najlepszą (tuli i mość kursową przy dużych prędkościach.
I I Współdziałanie napędu i steru
I I I Działanie boczne śruby
I u lulaniem bocznym śruby określa się w praktyce manewrowej łatwe do zaobserwowa-[|!n pisy pracy napędu głównego wstecz efekty wpływu niejednorodnej prędkości oraz nie-irtM ....i, clnści przepływu, występujące zarówno w strumieniu nadążającym, jak i w strumieni) .......bowym, które powodują powstawanie poprzecznych sił hydrodynamicznych na śru-
łM» i Miernie możliwe jest przedstawienie szeregu rozmaitych wyjaśnień bardzo złożonych ||»»i4 zachodzących w obszarze rufowej części kadłuba, to jest w miejscu pracy śruby
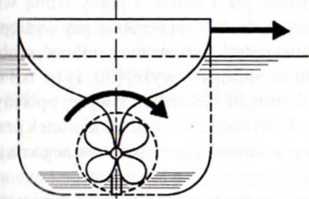
|fł 1 U Si lilia okrętowa zachowuje się tak, jakby napo-« i.,l \ry oór wody w dolnej części swej średnicy
napędowej i steru [28, 36, 128, 1, 197, 204], Ujęcie tych zjawisk w ścisłe zależności matematyczne, pomimo prowadzenia badań w tym kierunku, nie zostało jeszcze zakończone [36, 1], stąd też niecelowe wydaje się przedstawianie analizy wyników badań, tym bardziej że nie jest to konieczne z punktu widzenia praktyki manewrowej. Celowe natomiast jest wskazanie podstaw ułatwiających zrozumienie i zapamiętanie reakcji statku wywoła-
89
Wyszukiwarka
Podobne podstrony:
M035 prom „Guizzo”, który na trasie Włochy Sardynia przewozi jednorazowo 4M) pasażerów, 106 samochod
27(1) 5 Slalom wygrywa narciarz, który na trasie zjazdu zbierze największą liczbę punktów. Kto zosta
biegacze Biegacz, który na swej trasie zbierze największą sumę liczb, wygra wyścig. Który biegacz zo
156 ehnieaie * piersi nieszczęśliwego, zwróciło moją uwagę na człowieka, który na przeciw mnie wolny
242 O KLEJNOCIE DOLIWA, który na clilebie rycerskim się bawił, pod Połockiem, w Moskwi, i indziej w
WITOLD KOZAKIEWICZ 70Podsumowanie Nowoczesny system biblioteczny to system, który na pierwszym miejs
Zablokowali „pasy śmierci” Będzie sygnalizacja świetlna na przejściu dla pieszych na Trasie Czeskiej
PwTiR050 98 Rozdział 4 porozumienie się w państwie docelowym, jak też w państwach znajdujących się n
skanuj0016 (208) 191 5.3. Turystyka przemysłowa zwiedzanie zlokalizowanych przy nich muzeów itp., kt
więcej podobnych podstron