mech2 171

340
340
A1
= = u) 1 sin tp ,
BA1 " BA2
m w 1 sin tp.
Są to odśrodkowe siły 'bezwładności skierowane prostopadle do osi obrotu. Jeżeli nie można pominąć rozmiarów suwaka, to do każdej jego cząstki należy przyłożyć siłę bezwładności
Po przyłożeniu sił bezwładności, nadajemy układowi przemieszczenie przygotowane ó <p w kierunku zgodnym z ruchem wskazówek zegara. Korzystamy z o-gólnego równania dynamiki układu
6A (F) + ÓA (b) = 0.
Wyznaczamy prace przygotowane poszczególnych sił:
6 A = -G^l sintp ócp = -mgl Bintp 6 tp ,
G21 sincp ótp = mgl sintp 6 <p ,
6* (\l) * W cos q> ótp = m to ^1 sin tp cob tp 6 cp , = Ba21 cob qp ótp = m to 2i2
sin (p cos tpó <p ,
5 A sp^żyny) = “° (9 - <P^) 6 %
óA Ca
6 A
G-j 6 z,
przy czym
z = 21 cob tp ,
6 z = -21 sin tp 6 tp ,
czyli
6 A f = -21G,. sintp 6<p = -21mc g sin tp6 <p .
Praca sił bezwładności B„. Buwaka jest równa zeru, ponieważ przemieszczenie
Cii.
przygotowane 6z jest dla każdego elementu suwaka prostopadłe do kierunku siły bezwładności,
Podstawiając do ogólnego, równania dynamiki otrzymamy:
/ n 2 2 2 2
6 A ( F / + 6A f BJ = mto 1 sintp coscp ótp + m to 1 8in tp coBtpó tp -- c (p - tpj^ó tp - 21mc gBintp 6 cp= 0,
stąd prędkość kątowa
■i
-;-n
2glmc Bintp+ c£cp - <Pq)
ml ein2 cp
Zadanie 4 (rys. 252)
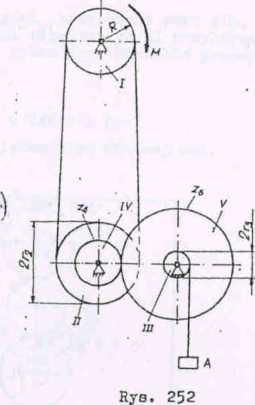
Na bęben napędowy I podnośnika działa stały moment obrotowy M. Określić przyspieszenie podnoszonego ciężaru A. Ciężary części obracających się, ciężary lin oraz tarcie pominąć. Dane są: promień E bębna I, promienie bębnów II i III odpowiednio równe rj i n, przełożenie między kołami IV i Y z,-/z, = ^ oraz masa m ciężaru A. 04
Odp.
- g.
Mr2k
mEr_
Zadanie 5 (rys. 253)
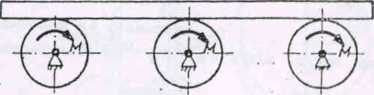
Na trzech pełnych jednorodnych. wałach znajduje Bię belka o masie m2, a każdy z wałów jest napędzany momentem obrotowym M. 0-kreślić przyspieszenie belki, jeśli jest dana masa nkażdego z wałów, promienie r wałów, a między wałami i belką nie ma poślizgu. Tarcie w OBiach pominąć.
Odp.
6M
(3m1_+ 2m2) r
Zadanie 6 (jtyb. 254)
Reduktor składa się z dwóch kół zębatych i II, których masy wynoszą odpowiednio nb| IH2, a promienie r i R. Na pierwsze koło
Rys. 253
i
działa moment M, wprawiający je w ruch, a na drugie koło działa moment hamujący K2 = 3/4 MiOkreślić przyspieszenia kątowe i e2 kół,traktując je jako jednorodne tarcze i przyjmując R = 12r«-Tarcie w łożyskach pominąć.
Odp.
8r
15M
E_ =
32r
5M
Zadanie 7 (rys. 255)
Regulator w postaci dźwigni kątowej ma zamocowane na końcach Ai>A2 ciężary o jednakowych masach. Długości ramion dźwigni wynoszą I4 i 12 Q&k na rys. 255), przy czym l«i / 12, kąt między ramionami wynosi 90°.Pomijając masę dźwigni oraz tarcie określić przy jakiej prędkości kątowej regulatora prosta łącząca' środki ciężarów ustawi się poziomo.
4
Wyszukiwarka
Podobne podstrony:
Obraz (171) 340 INDEKS OSÓB Bernard z Clairvaux, święty 217 Bernhard Thomas 313 Berserkr (pseud.) 29
171 2 340 XVII. Całki funkcji niewymiernych 1 gdzie Wn(x) jest wielomianem stopnia n. Całka (1)
1i1 t=0. 5(a1-c^) sin (2 ot) q,=0. Sfc^+c^łO.St^-c^c o s(2 ot)
mech2 104 r 206 Oststeoznie otrzymujemy 2 sin uj t + rQ, r2 _
mech2 104 r 206 Oststeoznie otrzymujemy 2 sin uj t + rQ, r2 _
mech2 125 248 stąd N - G cosa - P sin {3 = 0. Rys. 177 Warunek ruchu bez poślizgu jest następujący:
mech2 125 248 stąd N - G cosa - P sin {3 = 0. Rys. 177 Warunek ruchu bez poślizgu jest następujący:
mech2 3 4 1 2 3 13 5 coa Ą- t2 —5 sin y- t2 .14— -2t - 2 2 ~ t + 1 15 4 OOS -y t -3 sin -g-
mech2 3 4 1 2 3 13 5 coa Ą- t2 —5 sin y- t2 .14— -2t - 2 2 ~ t + 1 15 4 OOS -y t -3 sin -g-
img111 (10) Państwo 340 — Ależ tak, na Zeusa, Sokratesie — wmieszał się Polemarch
filtr7 Ruch wód gruntowych 340 [R. VII I nia przy ruchu wód gruntowych są to wartości do pomini
340 (6) 14.78. Co to są stale austenityczne kwasoodporne? Są to stale, które opróc
340 (8) 6. METODY MIESZANE6.1. Metoda parametryczna z warunkami wiążącymi parametry Są takie problem
więcej podobnych podstron