mechanika109
i 2 , cosa .
= I -co*A - sina ev
T sina ' *
a =■ e x r =
O
o> * ctg a O O
A tg a A cos a A sin a ♦ oJ/jctga cosaec = A cos a ev + o>*Acosa ctga e.
aA - 10 x v =
|
e> e« | |
|
0 |
-w* ctga 0 |
|
-w* A cos a |
0 <ołA |
- -co*Actga -ex - oj!, A cos a ctga *e?
mm mm mm J __ ^ —
a = aB = ao + ad = -w^Aclga-e^ ti>*Acosa-c
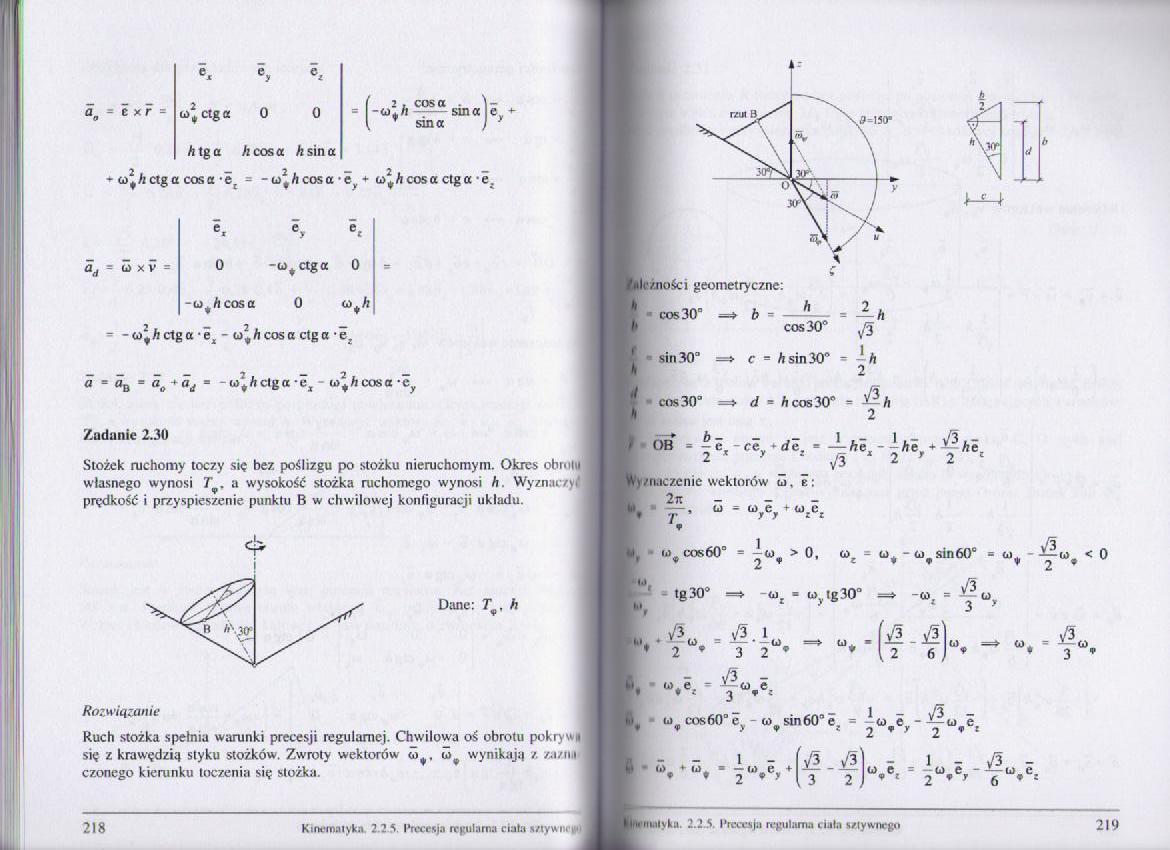
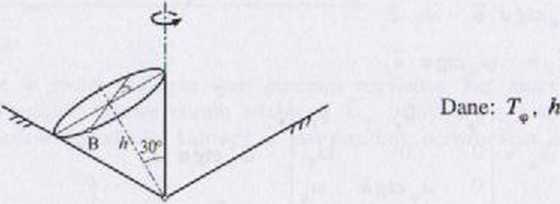
Zadanie 2.30
Stożek ruchomy toczy się bez poślizgu po stożku nieruchomym. Okres obrotu własnego wynosi 7^. a wysokość stożka ruchomego wynosi A. Wyznaczył prędkość i przyspieszenie punktu B w chwilowej konfiguracji układu.
Rozwiązanie
Ruch stożka spełnia warunki precesji regularnej. Chwilowa oś obrotu pokryun się z krawędzią styku stożków. Zwroty wektorów <ót. u>ę wynikają / za/n.i czonego kierunku toczenia się stożka.
Kinematyka 2.2 5. Precesja regularna ciała .sztywne*
__JL -___ M _ J
i ił>, cos60D = — oj >0, (*>. - (ił* - oj sin 60° = oj,, — u> < 0
-A. <

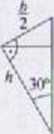
Inlc/nośo geometryczne:
|
h |
r r*r\r* TH" _w. |
h = |
* - 2 h |
|
b |
cos 30° ^ | ||
|
f |
- sin 30° => |
C = |
A sin 30“ - -A |
|
h |
2 | ||
|
,1 |
- cos30° => |
d - |
A cos 30“ - |
|
2 | |||
|
f > |
OB* = - e - |
cev ♦ |
de. » — he - - |
|
2 * |
z |
! f ' |
Ae.
|Vyznaczenie wektorów u, e: 2r.
he.
(j - G>yer + <u.e.
▼ ,m) T r w
“ **> *g30°
li.
fi
<*>♦ = v3 <*\
e, = -<o_e„ - —(j_e *T 2
«p r
i
lirm.iiyku. 2.2.5 Precesja tytularna ciała s/tywnego
219
- [fi y^l - 1 - fi -
(»i ♦ (ił^ ■ — w.e „ + ---- we, = -o> e - —u> e
• f 2 ♦ > I 3 2 I * 1 2 * 6 * z
Wyszukiwarka
Podobne podstrony:
DSC00096 7. Pomiar bicia uzębienia Średnica kulki pomiarowej dk = 5,1 mm dk = 2-rp-(cosą-tgq, - siną
(3) (3) G, G, sina
wzory redukcyjne Wzory redukcyjne sili(k • 360° 4- a) = sina tg(k • 180° 4- a) = tg a cos(k • 360° H
An- Aat Ap = cosa signn sina An «/> 1 “i C nV Ann2—sin2a 4sin2p (sin2a
mechanika32 Podukład III: 3RRS (plaski układ sil) M >< a o -N7 cos a + Hk =0 (1) Er=o: -N,s
s72 73 72 (ii) Jeżeli /?(sina;, — cosa;) = —R(sina;, cos a;), to stosujemy podstawienie sina; = t. (
Poznamka. Pfiklad lze reśit i ponekud umelym obrałem, uv6donn me-li si, że 1 + cosa = 2 cos2
Twierdzenie Sinusów sina si nb sine sin/1 sin B sinCTwierdzenie cosinusów dla boków: cosa = cosb cos
image70 sin cos in( af- Ą = sin a,cos/?- cos a,sin/? tg[ ar- Ą = - (a,~ /?} = cos avos/+ sin trsin^
zapoznać z głównymi założeniami, poznać mechanikę oraz co najważniejsze - kim się gra, jakie są
img119 cos x -f i sin o- f COS ar = ±(eł* + e-«) [sina- = - e~ix)
(rPeripheralsMotherboard l -sina - dale Graphics Resoluliorl EGA“Monitor non-interlaced pltch=
więcej podobnych podstron