Scan0087
Mn
(hu)
Mdq M dag) (I)
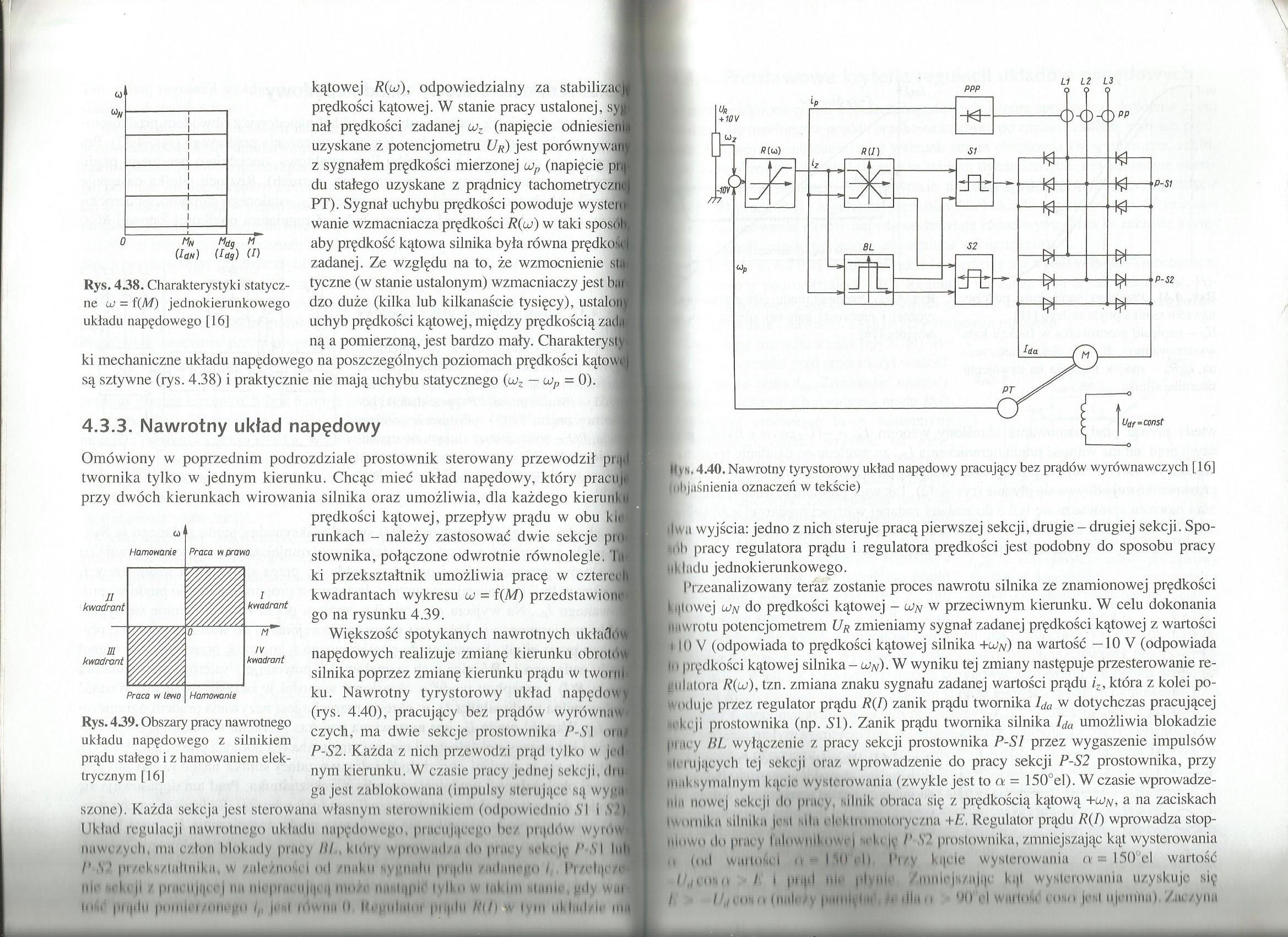
Rys. 438. Charakterystyki statyczne uj = f(M) jednokierunkowego układu napędowego 116]
kątowej R(u), odpowiedzialny za stabilizacH prędkości kątowej. W stanie pracy ustalonej, sy® nał prędkości zadanej u>z (napięcie odniesień® uzyskane z potencjometru UR) jest porównywart® z sygnałem prędkości mierzonej u)p (napięcie pntfl du stałego uzyskane z prądnicy tachometryczad PT). Sygnał uchybu prędkości powoduje wystaw wanie wzmacniacza prędkości R(u) w taki sposób aby prędkość kątowa silnika była równa prędkoś® zadanej. Ze względu na to, że wzmocnienie stąfl tyczne (w stanie ustalonym) wzmacniaczy jest barn dzo duże (kilka lub kilkanaście tysięcy), ustalonw uchyb prędkości kątowej, między prędkością zad® ną a pomierzoną, jest bardzo mały. Charakterystyk ki mechaniczne układu napędowego na poszczególnych poziomach prędkości kątowa są sztywne (rys. 4.38) i praktycznie nie mają uchybu statycznego (coz — cop = 0).
4.3.3. Nawrotny układ napędowy
Omówiony w poprzednim podrozdziale prostownik sterowany przewodził piątj twornika tylko w jednym kierunku. Chcąc mieć układ napędowy, który pracuj przy dwóch kierunkach wirowania silnika oraz umożliwia, dla każdego kierunki
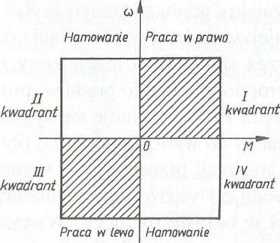
Rys. 439. Obszary pracy nawrotnego układu napędowego z silnikiem prądu stałego i z hamowaniem elektrycznym [16J
prędkości kątowej, przepływ prądu w obu ku runkach - należy zastosować dwie sekcje pi o stownika, połączone odwrotnie równolegle, la ki przekształtnik umożliwia pracę w cztercuj kwadrantach wykresu o; = f(M) przedstaw ionc--go na rysunku 4.39.

Większość spotykanych nawrotnych układów napędowych realizuje zmianę kierunku obrotów silnika poprzez zmianę kierunku prądu w twoim ku. Nawrotny tyrystorowy układ napędowi (rys. 4.40), pracujący bez prądów wyrówna w czych, ma dwie sekcje prostownika /J-,V I ord P-S2. Każda z nich przewodzi prąd tylko w p • 1 nym kierunku. W czasie pracy jednej sekcji, diu ga jest zablokowana (impulsy sterujące są wyga szone). Każda sekcja jest sterowana własnym sterownikiem (odpowiednio VI i V| Układ regulacji naw rolnego układu napędowego, pracującego In./ prądów wyrowi nnwc/yeh ma człon blokady pracy HI kloty wprowadzą do pracy mki jr /' .SI lub /' \pi/ekszbdinjkii w /ale/uosi i od 'miku • •• pmdn piądii utdatlrgo / |Jr/ęlą nii sekcji r pracu jące j tut ulępiaettjąęii nio£ó nastąpił tylko tak u u uame = |§i|y wafi
llirai prądu poitljń - O|jryo lj |. .( lin- i jił () JiegldubU j M ąd li R{f\ S" ł\U! I|| huL-li- ma
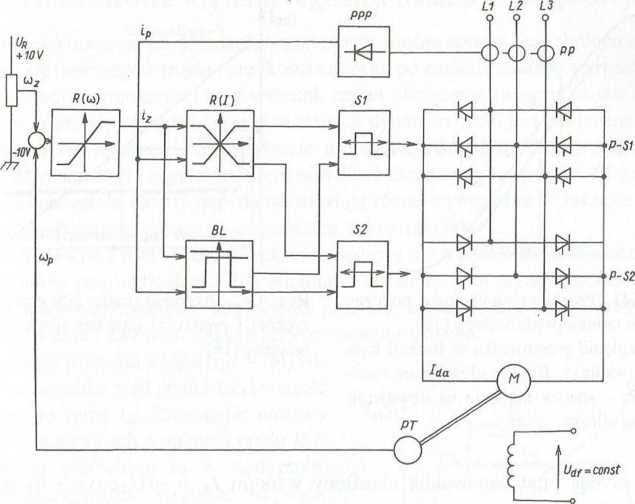
H> ‘i. 4.40. Nawrotny tyrystorowy układ napędowy pracujący bez prądów wyrównawczych [16] jtibjuśnienia oznaczeń w tekście)
ilu ,1 wyjścia: jedno z nich steruje pracą pierwszej sekcji, drugie - drugiej sekcji. Spo-|nli pracy regulatora prądu i regulatora prędkości jest podobny do sposobu pracy u! ludu jednokierunkowego.
I ’i zeanalizowany teraz zostanie proces nawrotu silnika ze znamionowej prędkości kątowej ujn do prędkości kątowej - w przeciwnym kierunku. W celu dokonania nawrotu potencjometrem Ur zmieniamy sygnał zadanej prędkości kątowej z wartości i 10 V (odpowiada to prędkości kątowej silnika +cu/v) na wartość —10 V (odpowiada i< • | nędkości kątowej silnika - uN). W wyniku tej zmiany następuje przesterowanie regulatora R(lu), tzn. zmiana znaku sygnału zadanej wartości prądu iz, która z kolei powoduje przez regulator prądu R(I) zanik prądu twornika Icicl w dotychczas pracującej sekcji prostownika (np. 51). Zanik prądu twornika silnika Ida umożliwia blokadzie phu y UL wyłączenie z pracy sekcji prostownika P-S1 przez wygaszenie impulsów h itijących tej sekcji oraz wprowadzenie do pracy sekcji P-S2 prostownika, przy ii. ii symalnym kącie wysterowania (zwykle jest to a = 150°el). W czasie wprowadze-m i nowej sekcji do piiu \ iInik obraca się z prędkością kątową +uyv, a na zaciskach . . >inil.a .ilnil ,i |f i ul,i • Irktn »muiu!\v/na i Regulator prądu R(I) wprowadza stop-mimo di i piiiey lulu'1 ml uwrj I. j. /’ S2 prostownika, zmniejszając kąt wysterowania i (od warU iści n = rli iV\ kąt ie wysterowania n = 150'cl wartość / jtie.ii / i ptąd ni* pb.hH /.intdejs/fljąc kąt wysterowaniu uzyskuje się i I ctife i i (należ \ painlęhie dln m 00 e| wątłość cosn jest ujemna) Zuc/ynu
Wyszukiwarka
Podobne podstrony:
224 3 4. TURBINY PAROWE Rys. 4.24. Charakterystyka statyczna regulatora prędkości obrotowej
skanuj0008 (44) Rys. 11.4. Charakterystyki statyczne badanych termometrów
2tom256 6. NAPĘD ELEKTRYCZNY 514 6. NAPĘD ELEKTRYCZNY 514 Rys. 6.57. Charakterystyki statyczne silni
zapas modułu Rys. Przykładowa charakterystyka amplitudowo-fazowa stabilnego układu otwartego (po
00 Rys. B.4. Niejednoznaczność charakterystyki statycznej 3. DOŚWIADCZALNE WYZNACZENIE CHARAKTERYSTY
39540 Zdjęcie1582 żonego w napęd ręczny boczny, pokazano na rys. 10.3. Charakterystyka statyczna sił
DSCF6657 270 Rys. 104. Charakterystyki statyczne fotodiody próżniowej (linia ciągła) i gazowanej (li
scan0008 (3) S52 - - / Rys. 12.8. Charakterystyki wzmacniacza magnetycznego a - charakterystyka bez
Scan0068 Rys. 4.2. Schemat blokowy złożonego układu napędowego f 16] - charakterys
image 017 Charakterystyka, promieniowania 17 Rys. 1.5. Przykładowa charakterystyka kierunkowa promie
Image092 Rys. 4.8. Typowe charakterystyki wyjściowe UOH — /(/OH) a) dla różnych wa
Image095 Rys. 4.13. Charakterystyki poboru mocy przez bramkę I-NIE (NAND) w zależności od
więcej podobnych podstron