10 (120)
ku szerokości zęba do szerokości przerwy między zębami oraz od długości szczeliny pomiędzy końcówką trzpienia 2, a powierzchnią zęba 4. Napięcie to doprowadzone jest do przerzutnika Schmitta, na wyjściu którego otrzymuje się impulsy prostokątne o częstotliwości proporcjonalnej do prędkości kątowej lub prędkości obrotowej. Wyznaczając prędkość obrotową należy liczbę impulsów zliczoną w czasie jednej sekundy podzielić przez liczbę zębów lub liczbę podziałek na obwodzie tarczy. Identyfikację początku obrotu można zrealizować usuwając np. na obwodzie tarczy jeden ząb, tworząc przerwę, którą na drodze elektronicznej można w prosty sposób wykryć.
Czujniki takie są odporne na zakłócenia (silny magnes N-S) i mogą pracować w szerokim zakresie temperatur. Wadą jest zależność napięcia wyjściowego cewki od prędkości kątowej oraz silna wrażliwość na zmianę długości szczeliny. Szczelina ta np. w przypadku wałów korbowych samochodów lub układu ABS jest rzędu (0,8-1,5) mm [4],
Wadą indukcyjnego czujnika prędkości kątowej jest dolne ograniczenie zakresu pomiarowego i nieprzydatność tych czujników w pomiarach prędkości bardzo małych - ąuasistatycznych. Wady tej pozbawione są czujniki hallotronowe.
d) Tachometr z czujnikiem halotronowym
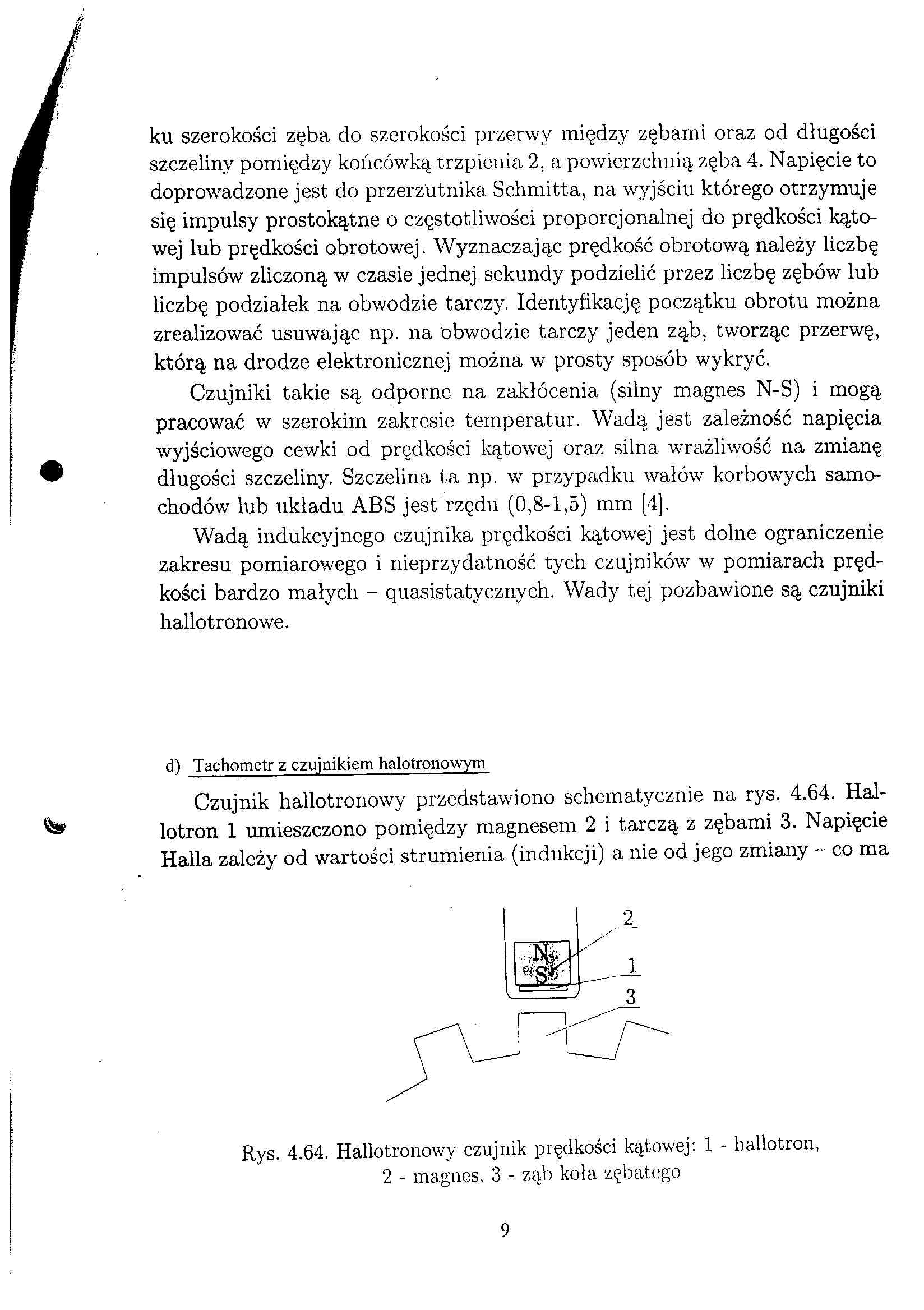
Czujnik hallotronowy przedstawiono schematycznie na rys. 4.64. Hal-lotron 1 umieszczono pomiędzy magnesem 2 i tarczą z zębami 3. Napięcie Halla zależy od wartości strumienia (indukcji) a nie od jego zmiany - co ma

Rys. 4.64. Hallotronowy czujnik prędkości kątowej: 1 ~ hallotron, 2 - magnes, 3 - ząb koła zębatego
9
Wyszukiwarka
Podobne podstrony:
d = 1,0 mm 1,0 1,5 2,0 2,5 3,0 5,0 10,0 15,0 20,0 Szerokość odstępu miedzy segmentami [mm] 70
Rys. 10.28. Wykop szerokoprzestrzenny ze skarpami nachylonymi w gruncie suchym i ścianką szczelną w
IMG140 Ki no wierzchni pod lutowanie); połączeń do wytwarzania przerw między płytkami przemieszczają
DSC00266 2 G 42-letni, niski, szczupły mężczyzna zgłosił się do lekarza z powodu duszności pojawiają
img280�01 djvu 283 do sady en iii. a więc wykopać doły w odległości !0 m. (zależnie od gatunku drzew
Skanowanie 10 04 27 41 (7) rzeczy do jednej podstawowej różnicy w spojrzeniu na język w szerokim ko
P1010744 (3) 120
P1010744 (3) 120
DSC02154 (10) rosma ^rojipć, że ^doVceć do której uwzględnia msfcpaŃfe 3ońoMv jkX równa pcńwójpej sz
86308 P1010744 (3) 120
Gdy b — 6...7% — łopaty są wąskie, 6 = 9... 10% —łopaty są szerokie. Grubość łopaty g dla danego
Gdy b — 6...7% — łopaty są wąskie, 6 = 9... 10% —łopaty są szerokie. Grubość łopaty g dla danego
strona02 (2) Zależność pozwnlu określić szerokość przerwy energetycznej materiału przy pomocy pomiar
120 Rozdział 10 i statystyki matematycznej. Na ogół do obliczania wartości średniej potrzeba kilkana
więcej podobnych podstron