M041
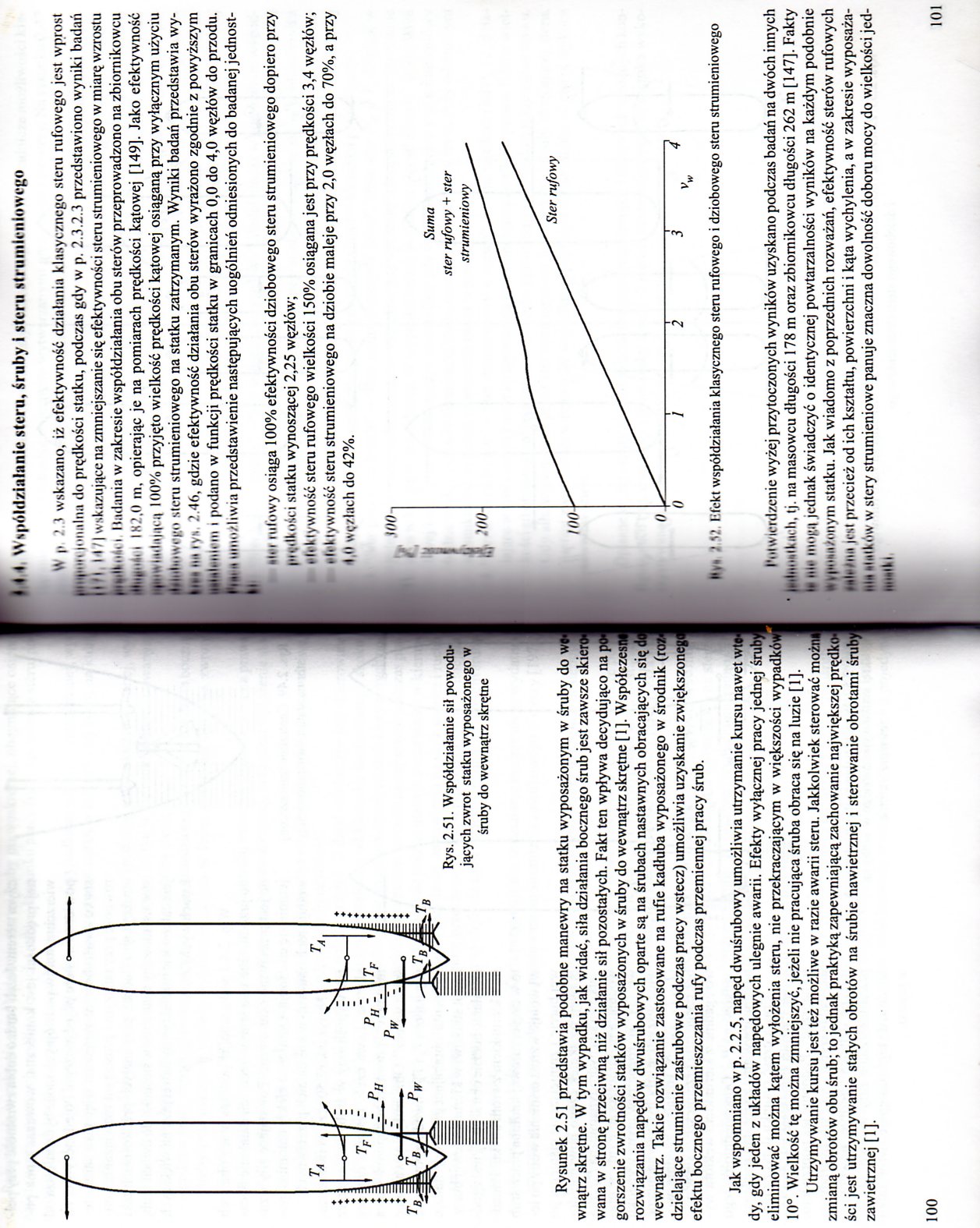
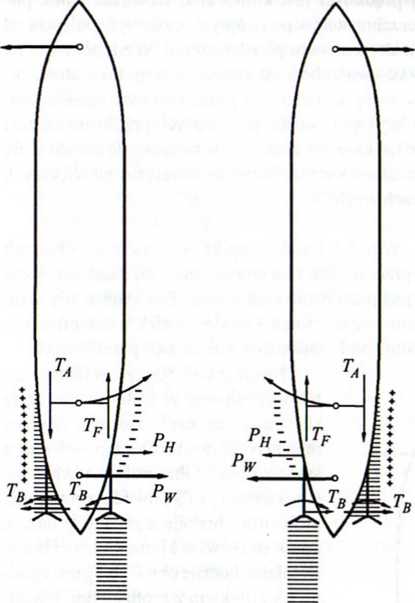
Rys. 2.51. Współdziałanie sił powodujących zwrot statku wyposażonego w śruby do wewnątrz skrętne
Rysunek 2.51 przedstawia podobne manewry na statku wyposażonym w śruby do wo wnątrz skrętne. W tym wypadku, jak widać, siła działania bocznego śrub jest zawsze skiero wana w stronę przeciwną niż działanie sił pozostałych. Fakt ten wpływa decydująco na po gorszenie zwrotności statków wyposażonych w śruby do wewnątrz skrętne [1]. Współczest* rozwiązania napędów dwuśrubowych oparte są na śrubach nastawnych obracających się d( wewnątrz. Takie rozwiązanie zastosowane na rufie kadłuba wyposażonego w środnik (raz dzielające strumienie zaśrubowe podczas pracy wstecz) umożliwia uzyskanie zwiększonegi efektu bocznego przemieszczania rufy podczas przemiennej pracy śrub.
Jak wspomniano w p. 2.2.5, napęd dwuśrubowy umożliwia utrzymanie kursu nawet wto dy, gdy jeden z układów napędowych ulegnie awarii. Efekty wyłącznej pracy jednej śruby eliminować można kątem wyłożenia steru, nie przekraczającym w większości wypadków 10°. Wielkość tę można zmniejszyć, jeżeli nie pracująca śruba obraca się na luzie [1], Utrzymywanie kursu jest też możliwe w razie awarii steru. Jakkolwiek sterować możni zmianą obrotów obu śrub; to jednak praktyką zapewniającą zachowanie największej prędko* ści jest utrzymywanie stałych obrotów na śrubie nawietrznej i sterowanie obrotami śruby zawietrznej [1].
< t t W spóld/iiiliinic steru, śruby i steru strumieniowego
|i 1 wskazano, iż efektywność działania klasycznego steru rufowego jest wprost
r i.....lonalna do prędkości statku, podczas gdy w p. 2.3.2.3 przedstawiono wyniki badań
IM 11 /1 wskazujące na zmniejszanie się efektywności steru strumieniowego w miarę wzrostu 11. II m i i li.ulania w zakresie współdziałania obu sterów przeprowadzono na zbiornikowcu
II........ i IK.\0 m, opierając je na pomiarach prędkości kątowej [149], Jako efektywność
ląiin* iitdit|i|ci| 100% przyjęto wielkość prędkości kątowej osiąganą przy wyłącznym użyciu l i iIhm, ego steru strumieniowego na statku zatrzymanym. Wyniki badań przedstawia wy-i. . • nu i v*, 2.46, gdzie efektywność działania obu sterów wyrażono zgodnie z powyższym i.i.,i.mi im i podano w funkcji prędkości statku w granicach 0,0 do 4,0 węzłów do przodu. I im u umożliwia przedstawienie następujących uogólnień odniesionych do badanej jednostki
•u i nilowy osiąga 100% efektywności dziobowego steru strumieniowego dopiero przy pHilkości statku wynoszącej 2,25 węzłów;
. li klywność steru rufowego wielkości 150% osiągana jest przy prędkości 3,4 węzłów; • klywność steru strumieniowego na dziobie maleje przy 2,0 węzłach do 70%, a przy I u węzłach do 42%.
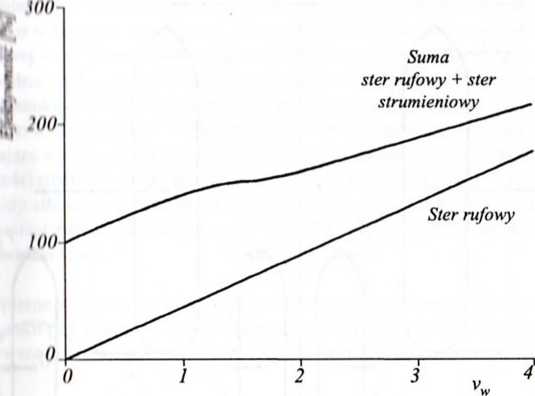
IM« ! V lifekt współdziałania klasycznego steru rufowego i dziobowego steru strumieniowego
l'i(twierdzenie wyżej przytoczonych wyników uzyskano podczas badań na dwóch innych
• p di.....ikm li, tj. na masowcu długości 178 m oraz zbiornikowcu długości 262 m [147], Fakty
i> uli mogą jednak świadczyć o identycznej powtarzalności wyników na każdym podobnie
•, .......i/nnym statku. Jak wiadomo z poprzednich rozważań, efektywność sterów rufowych
• uli urn |fsl przecież od ich kształtu, powierzchni i kąta wychylenia, a w zakresie wyposażaniu -lulków w stery strumieniowe panuje znaczna dowolność doboru mocy do wielkości jed-HlUlkl
101
Wyszukiwarka
Podobne podstrony:
M041 Rys. 2.51. Współdziałanie sił powodu-J jących zwrot statku wyposażonego w śruby do wewnątr
M028 b Rys.2.17. Współdziałanie sił wywołujących zwrot statku nia steru z pozycji środkowej do momen
M028 a Rys.2.17. Współdziałanie sił wywołujących zwrot statku nia steru z pozycji środkowej do momen
Image143 rys. 4.91. Impuls „start” powoduje wpisanie informacji do rejestru i odblokowanie bramki B.
img046 (40) 46 Rys. 49 Rys. 50 Rys. 51 i Ruletki (tasiemki) - rysunek 51 - są to wstęgi stalowe lut
img137 (4) Na rys. 51 przedstawiono widok gotowego modelu, którego działanie demonstrowałem w
LastScan3 995 mb 1000 mb 1005 mb 1010 mb Rys. 76. Rozkład sił warunkujących występowanie w
skanuj0090 (32) Rys. 48. PIR m. prosty uda. Rys. 50. Test MennelCa - PIR m. biodrowo-lędźwiowy N Ry
skanuj0387 Rys. 3.50. Kwarc a — bliźniak japoński Rys. 3.51. Bliźniak aragonitu; struktura między li
star266105 Skrzynka biegów 105 Skrzynka biegów 105 Rys. 4-51. Zamontowanie wspornika kątowego mocują
IMGd72 Rys. 8.9. Do zadania 8.14 jak to zaznaczono na rys. 8.9a. Definicje sił wewnętrznych, tj. sił
więcej podobnych podstron