039 bmp
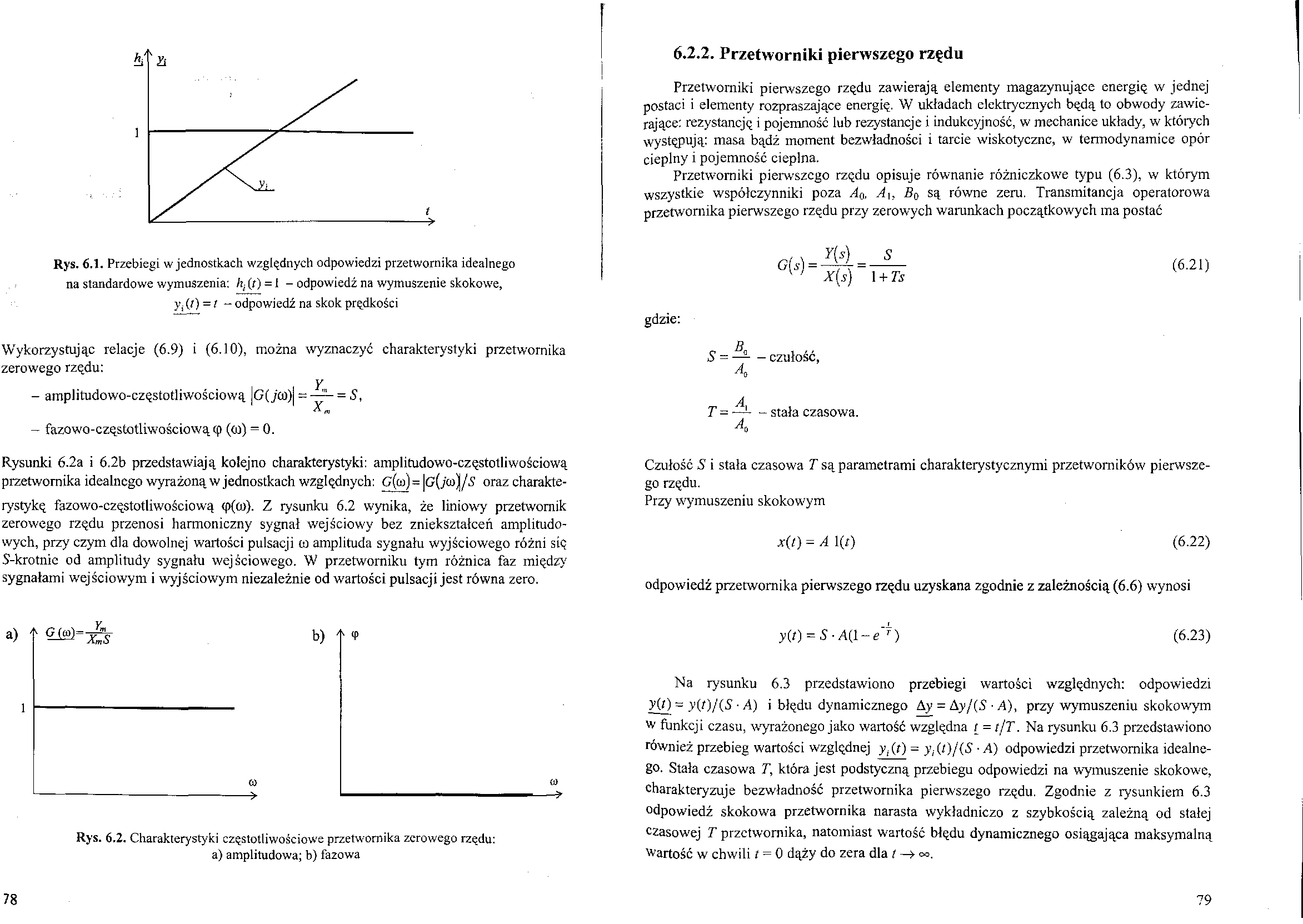
Rys. 6.1. Przebiegi w jednostkach względnych odpowiedzi przetwornika idealnego na standardowe wymuszenia: hi (f) = 1 - odpowiedź na wymuszenie skokowe, y. (t) = t - odpowiedź na skok prędkości
Wykorzystując relacje (6.9) i (6.10), można wyznaczyć charakterystyki przetwornika zerowego rzędu:
Y
- amplitudowo-częstotliwościową lG(jćo)| = Ó,
- fazowo-częstotliwościową tp (co) = 0.
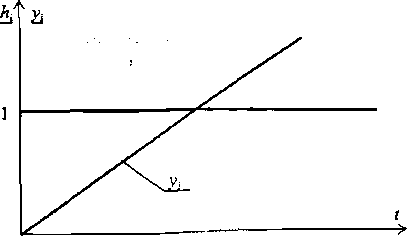
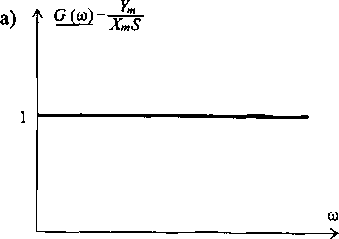
Rysunki 6.2a i 6.2b przedstawiają kolejno charakterystyki: amplitudowo-częstotliwościową przetwornika idealnego wyrażoną w jednostkach względnych: G(to) = |g(;co)|/S oraz charakterystykę fazowo-częstotliwościową (p(ctf). Z rysunku 6.2 wynika, że liniowy przetwornik zerowego rzędu przenosi harmoniczny sygnał wejściowy bez zniekształceń amplitudowych, przy czym dla dowolnej wartości pulsacji to amplituda sygnału wyjściowego różni się S-krotnie od amplitudy sygnału wejściowego. W przetworniku tym różnica faz między sygnałami wejściowym i wyjściowym niezależnie od wartości pulsacji jest równa zero.
b)
O)
Rys. 6.2. Charakterystyki częstotliwościowe przetwornika zerowego rzędu: a) amplitudowa; b) fazowa
6.2.2. Przetworniki pierwszego rzędu
Przetworniki pierwszego rządu zawierają elementy magazynujące energią w jednej postaci i elementy rozpraszające energię. W układach elektrycznych będą to obwody zawierające: rezystancją i pojemność lub rezystancje i indukcyjność, w mechanice układy, w których występują: masa bądź moment bezwładności i tarcie wiskotyczne, w termodynamice opór cieplny i pojemność cieplna.
Przetworniki pierwszego rzędu opisuje równanie różniczkowe typu (6.3), w którym wszystkie współczynniki poza A0l Ab B0 są równe zeru. Transmitancja operatorowa przetwornika pierwszego rzędu przy zerowych warunkach początkowych ma postać
S
1 + Ts
(6.21)
gdzie:
_ B. ,
S = — - czułosc,
Ą
„ A.
T = ~— stała czasowa.
A
Czułość S i stała czasowa T są parametrami charakterystycznymi przetworników pierwszego rzędu.
Przy wymuszeniu skokowym
jt(0 = A l(r) (6.22)
odpowiedź przetwornika pierwszego rzędu uzyskana zgodnie z zależnością (6.6) wynosi
y(0 = S-A(l-e'r) (6.23)
Na rysunku 6.3 przedstawiono przebiegi wartości względnych: odpowiedzi y(0 - y{t)l(S • A) i błędu dynamicznego Ay = Ayj(S • A), przy wymuszeniu skokowym w funkcji czasu, wyrażonego jako wartość względna / = tjT. Na rysunku 6.3 przedstawiono również przebieg wartości względnej y,(0 - y-t (0/(5 - A) odpowiedzi przetwornika idealnego. Stała czasowa T, która jest podstyczną przebiegu odpowiedzi na wymuszenie skokowe, charakteryzuje bezwładność przetwornika pierwszego rzędu. Zgodnie z rysunkiem 6.3 odpowiedź skokowa przetwornika narasta wykładniczo z szybkością zależną od stałej czasowej T przetwornika, natomiast wartość błędu dynamicznego osiągająca maksymalną wartość w chwili t = 0 dąży do zera dla t —¥
79
Wyszukiwarka
Podobne podstrony:
Rys. 6.1. Przebiegi w jednostkach względnych odpowiedzi przetwornika idealnego na standardowe wymusz
Rys. 6.3. Przebiegi w jednostkach względnych odpowiedzi skokowej y(r) i błędu dynamicznego j Ay prze
045 bmp T, Rys. 6.11. Parametry opisujące odpowiedź na skokowy sygnał wejściowy inercyjnego przetwor
041 bmp odpowiedzi przetwornika pierwszego rzędu przy wymuszeniu w postaci skoku prędkości jest równ
212 Z. Święcicka Rys. 1. Relacje między oddziałami odpowiedzialności w rozliczaniu kosztów na projek
DSCN3820 Q Rys. 4.2. Przebiegi napięcia i natężenia prę-du kondensatora na ekranie oscylografu Rys.
70114 IMG273 (2) Zasada superpozycji Odpowiedź okładu lodowego na sumę wymuszeń równa się sumie odpo
2012 05 09 150 Zasilacz Grupa Ą - Odpowiedzi proszą udzielał na osobnej kartce. Hi* pij&ł po kar
Rys. 6.8. Przebiegi odpowiedzi przetwomilnka dugiego rzrzędta skokowy sygnał wejściowy w zależności
Rys.4. Silnik Volvo D12D500 [3] Określenia przebiegu jednostkowego zużycia paliwa dokonano metoda
CCF20091019�006 148 M Panaciski jednostkowe przy zgrzewaniu doc/;olinvy ii} nacisk jednostkowy Rys.
Sterowanie dyskretne pracą *0,coi j j Rys Fig Odpowiedź układu sterowania na zakłócenie i przebiegi
A. Bogucki, Z. Bartoń Rys. 5. Odpowiedź układu sterowania na zakłócenie i przebiegi mocy wymień- nny
więcej podobnych podstron