Image 015
W9-5
W9-5
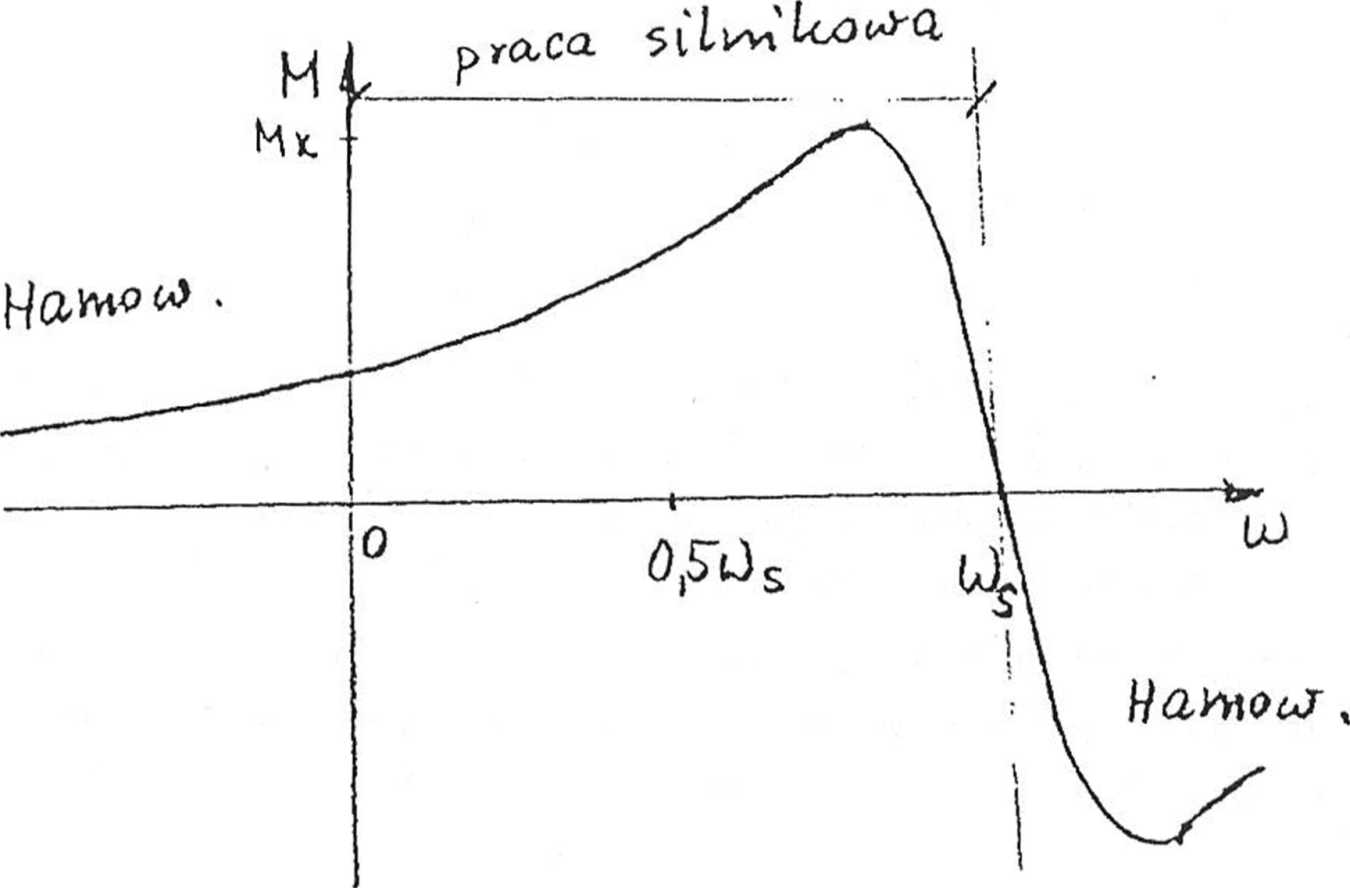
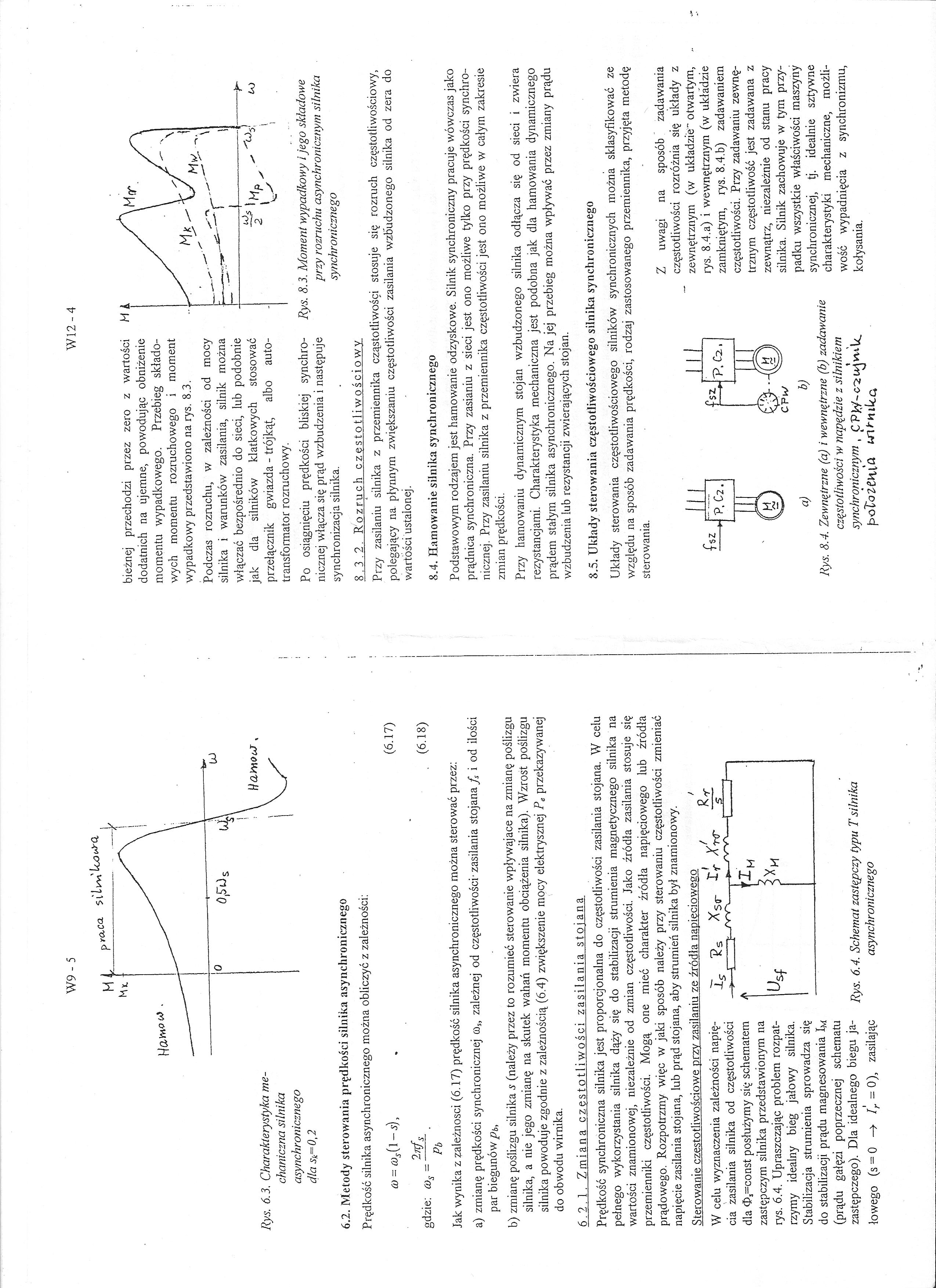
Rys. 6.3. Charakterystyka mechaniczna silnika asynchronicznego dla Sk= 0,2
6.2. Metody sterowania prędkości silnika asynchronicznego
Prędkość silnika asynchronicznego można obliczyć z zależności:
gdzie: cos =
Pb
(6.17)
(6.18)
Jak wynika z zależności (6.17) prędkość silnika asynchronicznego można sterować przez:
a) zmianę prędkości synchronicznej cos, zależnej od częstotliwości* zasilania stojana fs i od ilości par biegunów pb,
b) zmianę poślizgu silnika s (należy przez to rozumieć sterowanie wpływające na zmianę poślizgu silnika, a nie jego zmianę na skutek wahań momentu obciążenia silnika). Wzrost poślizgu silnika powoduje zgodnie z zależnością (6.4) zwiększenie mocy elektrysznej Pe przekazywanej do obwodu wirnika.
6.2,1. Zmiana częstotliwości zasilania stojana
Prędkość synchroniczna silnika jest proporcjonalna do częstotliwości zasilania stojana. W celu pełnego wykorzystania silnika dąży się do stabilizacji strumienia magnetycznego silnika na wartości znamionowej, niezależnie od zmian częstotliwości. Jako źródła zasilania stosuje się przemienniki częstotliwości. Mogą one mieć charakter źródła napięciowego lub źródła prądowego. Rozpotrzmy więc w jaki sposób należy przy sterowaniu częstotliwości zmieniać napięcie zasilania stojana, lub prąd stojana, aby strumień silnika był znamionowy.
Sterowanie częstotliwościowe przy zasilaniu ze źródła napięciowego
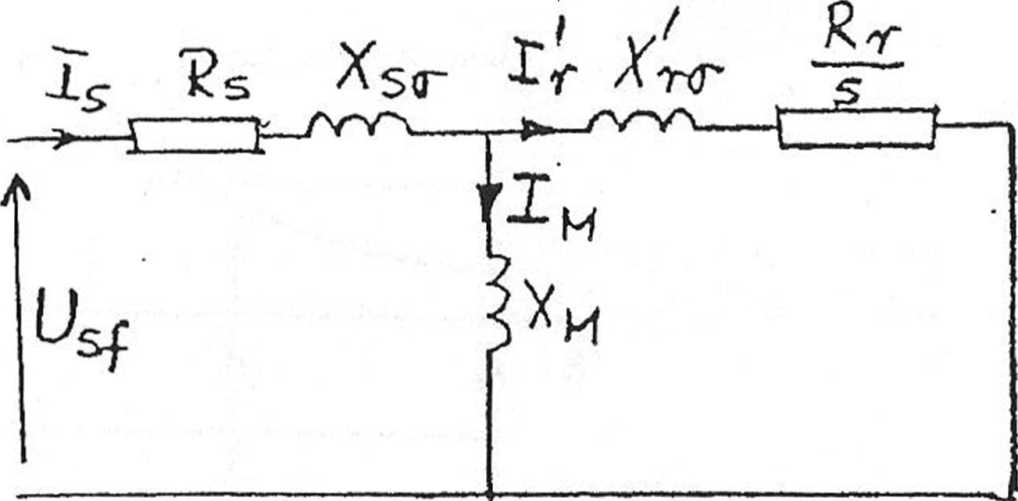
Rys. 6.4. Schemat zastępczy typu T silnika asynchronicznego
W celu wyznaczenia zależności napięcia zasilania silnika od częstotliwości dla <J>3=const posłużymy się schematem zastępczym silnika przedstawionym na rys. 6.4. Upraszczając problem rozpatrzymy idealny bieg jałowy silnika. Stabilizacja strumienia sprowadza się do stabilizacji prądu magnesowania Im (prądu gałęzi poprzecznej schematu zastępczego). Dla idealnego biegu jałowego (s = 0 -> lr - 0), zasilając
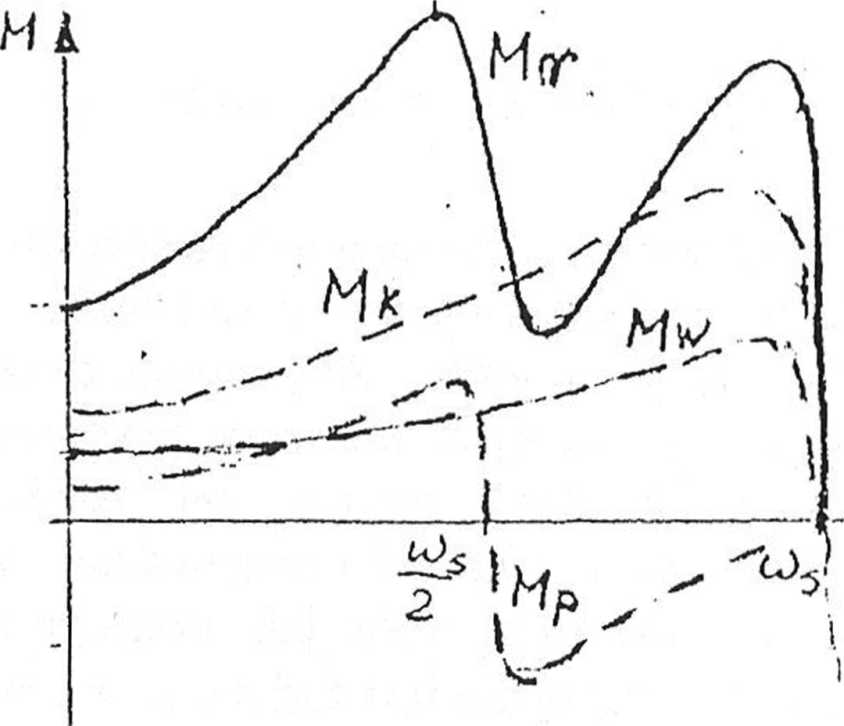
bieżnej przechodzi przez zero z wartości dodatnich na ujemne, powodując obniżenie momentu wypadkowego. Przebieg składowych momentu rozruchowego i moment wypadkowy przedstawiono na rys. 8.3.
i
Podczas rozruchu, w zależności od mocy silnika i warunków zasilania, silnik można włączać bezpośrednio do sieci, lub podobnie jak dla silników klatkowych stosować
gwiazda - trójkąt, albo autotransformator rozruchowy.
Rys. 8.3. Moment wypadkowy i jego składowe przy rozruchu asynchronicznym silnika synchronicznego
Po osiągnięciu prędkości bliskiej synchronicznej włącza się prąd wzbudzenia i następuje synchronizacja silnika.
8,3.2. Rozruch częstotliwościowy
Przy zasilaniu silnika z przemiennika cząstotliwości stosuje się rozruch częstotliwościowy, polegający na płynnym zwiększaniu częstotliwości zasilania wzbudzonego silnika od zera do wartości ustalonej.
8.4. Hamowanie silnika synchronicznego
Podstawowym rodzajem jest hamowanie odzyskowe. Silnik synchroniczny pracuje wówczas jako prądnica synchroniczna. Przy zasianiu z sieci jest ono możliwe tylko przy prędkości synchronicznej. Przy zasilaniu silnika z przemiennika częstotliwości jest ono możliwe w całym zakresie zmian prędkości.
Przy hamowaniu dynamicznym stojan wzbudzonego silnika odłącza się od sieci i zwiera rezystancjami. Charakterystyka mechaniczna jest podobna jak dla hamowania dynamicznego prądem stałym silnika asynchronicznego. Na jej przebieg można wpływać przez zmiany prądu wzbudzenia lub rezystancji zwierających stojan.
8.5. Układy sterowania częstotliwościowego silnika synchronicznego
Układy sterowania częstotliwościowego silników synchronicznych można sklasyfikować ze względu na sposób zadawania prędkości, rodzaj zastosowanego przemiennika, przyjęta metodę sterowania.
a)
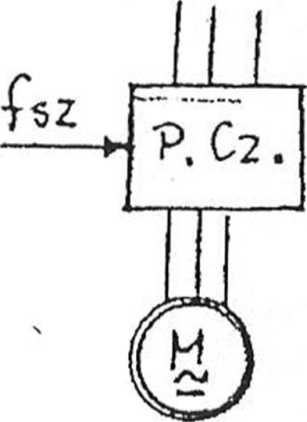
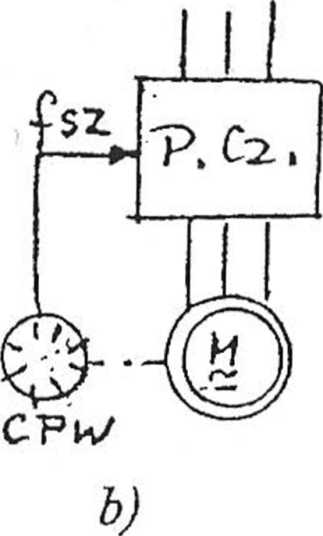
Rys. 8.4. Zewnętrzne (a) i wewnętrzne (b) zadawanie częstotliwości w napędzie z silnikiem
synchronicznym , CVW-czzuąmlc
p>oloithia ^
Z uwagi na sposób zadawania częstotliwości rozróżnia się układy z zewnętrznym (w układzie’' otwartym, rys. 8.4.a) i wewnętrznym (w układzie zamkniętym, rys. 8.4.b) zadawaniem częstotliwości. Przy zadawaniu zewnętrznym częstotliwość jest zadawana z zewnątrz, niezależnie od stanu pracy silnika. Silnik zachowuje w tym przypadku wszystkie właściwości maszyny synchronicznej, tj. idealnie sztywne charakterystyki mechaniczne, możliwość wypadnięcia z synchronizmu, kołysania.
A*
Wyszukiwarka
Podobne podstrony:
Rys. 2. Charakterystyki mechaniczne silników prądu stałego 1 i 2 - bocznikowego i obcowzbudnego: 1 p
Rys. 8. Charakterystyki mechaniczne silnika indukcyjnego wykonawczego: a) przy sterowaniu amplitudow
3tom175 5. ELEKTROENERGETYKA PRZEMYSŁOWA Rys. 5.9. Charakterystyki mechaniczne silnika indukcyjnego
Rys. 1. Charakterystyki mechaniczne silnika indukcyjnego przy różnych częstotliwościach
DSCF8496 62 Rys.6.1. Charakterystyka mechaniczna silnika skokowego wysokomomentowego 6.2.1. Zalety s
IMG207 207 Ry*. 17.2. Charakterystyka mechaniczna silnika bocznikowego Rys. 17.3. Charakterystyka me
Ą > <h > -Pi Rys. 12. Charakterystyki mechaniczne silnika bocznikowego prądu stałego przy r
CCF20111125�011 (4) Rys. 16. Charakterystyki mechaniczne silnika szeregowego z samowzbudzeniem.4.2.
CCF20111125�019 (2) Rys. 26. Charakterystyczna mechaniczna silnika bocznikowego (obcowzbudnego)
CCF20111125�020 Rys. 28. Charakterystyki mechaniczne silnika obcowzbudnego. Rezystancję podano
Rys. 1. Typowe charakterystyki mechaniczne silników elektrycznych 1 - synchroniczna, 2 - bocznikowa,
Image 011 W9- 11 ń>! = Pl (6.29) Silnik drugi zasilany jest napięciem wirnika silnika pierwszego
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
IMG225 225 Rys. 19.U. Charakterystyki obciążeniowe silnika asynchronicznego część, która Jest niesta
IMG 67 (2) mIj i i a a Silnik ZS ty Rys. 7.3. Charakterystyki prędkościowe: a) silnika Zl, b) silnik
więcej podobnych podstron