instalacje080
2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 44
Szkic konstrukcyjny urządzenia w dwóch wariantach pokazano na rys. 2.18. Na rysunku oznaczają: 1-1' — bieguny magnetowodu urządzenia do magnesowania; 2 — cewka wzbudzająca; 3 — uzwojenie silnika skokowego; 4 — rdzeń stojana silnika skokowego; 5 — rdzeń wirnika silnika skokowego; 6 — tunel zabezpieczający przed rozmagnesowaniem.
W związku z tym, że ze zmianą reluktancji obwodu z magnesem trwałym ulega on częściowemu rozmagnesowaniu, aby zapewnić skuteczne magnesowanie na zewnątrz maszyny zastosowano strefy ochronne w postaci dodatkowej tu lei magnetycznej (w wariancie b) lub w postaci specjalnie skonstruowanej magneśnicy umożliwiającej wyjmowanie wirnika na zewnątrz maszyny bez otwarcia obwodu magnetycznego (w wariancie a).
Odrębnym zagadnieniem jest wytworzenie odpowiednio silnego pola magnetycznego, niezbędnego do namagnesowania magnesu trwałego. Aby doprowadzić magnes do stanu nasycenia — natężenie pola magnetycznego magnesującego powinno być teoretycznie nieskończenie duże. Jednakże już przy Hs > 5BHC właściwości magnetyczne materiału magnesowanego zmieniają się nieznacznie (we wzorze: Hs — natężenie pola magnetycznego magnesującego; aHc — natężenie pola magnetycznego powściągające dla danego materiału magnetycznego). Jak widać, przy magnesowaniu konieczna jest znajomość BHC materiału magnesowanego.
Przy magnesowaniu trzeba również zwrócić uwagę, aby przekrój magnesowanego wirnika był równomierny, gdyż w przeciwnym razie mogą się zdarzyć miejsca niedomagnesowane.
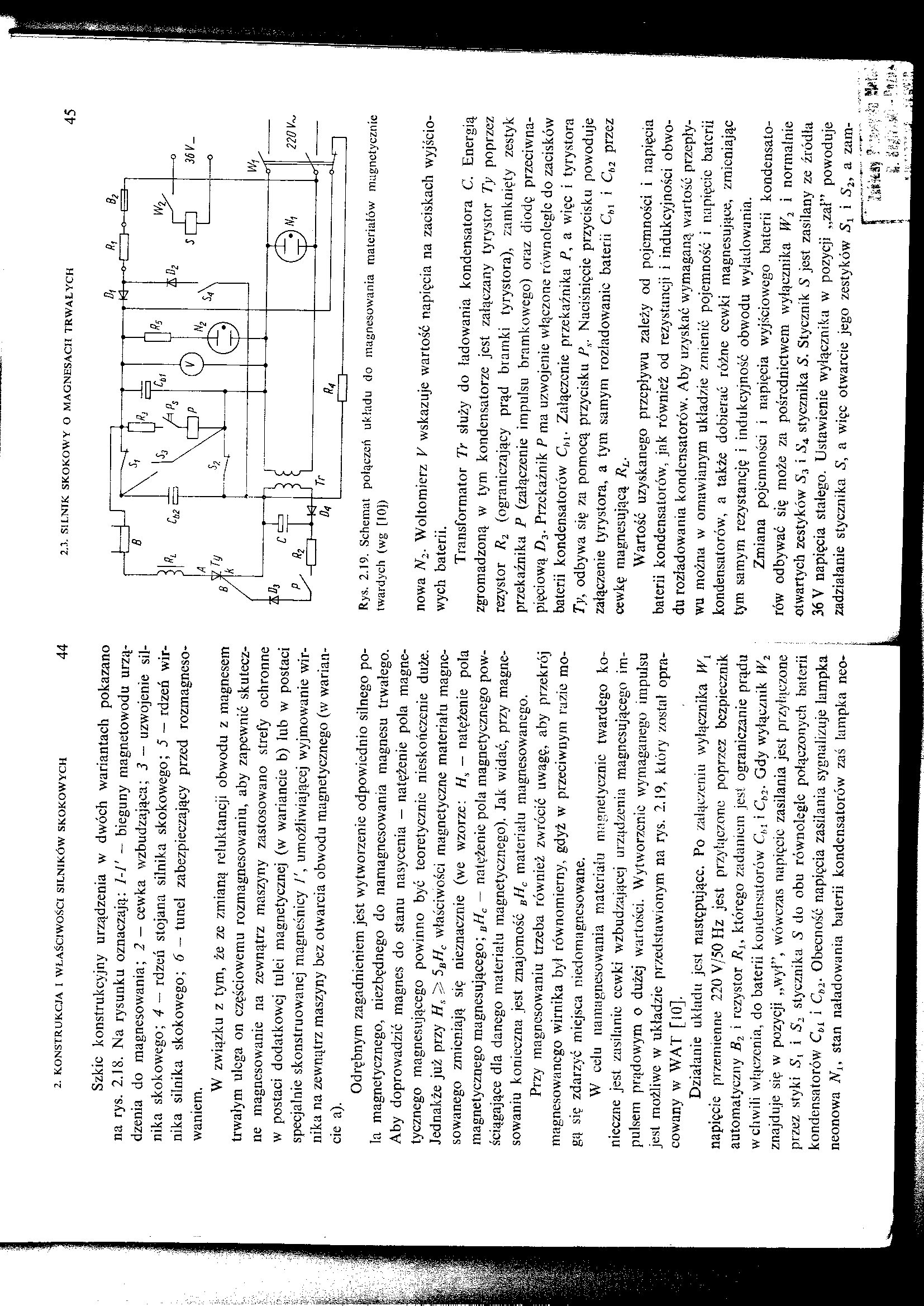
W celu namagnesowania materiału magnetycznie twardego konieczne jest zasilanie cewki wzbudzającej urządzenia magnesującego impulsem prądowym o dużej wartości. Wytworzenie wymaganego impulsu jest możliwe w układzie przedstawionym na rys. 2.19, który został opracowany w WAT [10].
Działanie układu jest następujące. Po załączeniu wyłącznika fVl napięcie przemienne 220 V/50 Hz jest przyłączone poprzez bezpiecznik automatyczny B2 i rezystor Ru którego zadaniem jest ograniczanie prądu w chwili włączenia, do baterii kondensatorów Chl i Cb2. Gdy wyłącznik W2 znajduje się w pozycji „wył”, wówczas napięcie zasilania jest przyłączone przez styki S{ i S2 stycznika S do obu równolegle połączonych baterii kondensatorów CbL i Chl. Obecność napięcia zasilania sygnalizuje lampka neonowa Nlt stan naładowania baterii kondensatorów zaś lampka neo-

Rys. 2.19. Schemat połączeń układu do magnesowania materiałów magnetycznie twardych (wg [10])
nowa Nz- Woltomierz V wskazuje wartość napięcia na zaciskach wyjściowych baterii.
Transformator Tr służy do ładowania kondensatora C. Energią zgromadzoną w tym kondensatorze jest załączany tyrystor Ty poprzez rezystor R2 (ograniczający prąd bramki tyrystora), zamknięty zestyk przekaźnika P (załączenie impulsu bramkowego) oraz diodę przeciwna-pięciową D3. Przekaźnik P ma uzwojenie włączone równolegle do zacisków baterii kondensatorów CM. Załączenie przekaźnika P, a więc i tyrystora Ty, odbywa się za pomocą przycisku Px. Naciśnięcie przycisku powoduje załączenie tyrystora, a tym samym rozładowanie baterii Chl i Cb2 przez cewkę magnesującą RL.
Wartość uzyskanego przepływu zależy od pojemności i napięcia baterii kondensatorów, jak również od rezystancji i indukcyjności obwodu rozładowania kondensatorów. Aby uzyskać wymaganą wartość przepływu można w omawianym układzie zmienić pojemność i napięcie baterii kondensatorów, a także dobierać różne cewki magnesujące, zmieniając tym samym rezystancję i indukcyjność obwodu wyładowania.
Zmiana pojemności i napięcia wyjściowego baterii kondensatorów odbywać się może za pośrednictwem wyłącznika W2 i normalnie otwartych zestyków S3 i SA stycznika S. Stycznik 5 jest zasilany ze źródła 36 V napięcia stałego. Ustawienie wyłącznika w pozycji „zał” powoduje zadziałanie stycznika S, a więc otwarcie jego zestyków Sx i S2, a zam-
Wyszukiwarka
Podobne podstrony:
instalacje071 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 26 Zasada działania silnika skokowego
instalacje072 2. KONSTRUKCJA l WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 28 Rys. 2.5. Rozkład momentu statyczne
instalacje074 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 32 janie kilkupasmowe uzwojenie steruj
instalacje079 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 42 mieszką metali ziem rzadkich ma tec
instalacje089 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 60 Mogą być stosowane trzy rodzaje uk
instalacje090 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 62 Praca półskokowa w silnikach pięcio
instalacje091 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 64 że jedno z nich musi być łewoskrętn
instalacje134 5. UWAGI O OBLICZANIU SILNIKÓW SKOKOWYCH 148 Rys. 5.5. Szkic konstrukcyjny silnika sko
instalacje073 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 30 W przypadku struktury pokazanej na
instalacje078 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 40 Ponieważ nHc ferrytów jest bardzo d
instalacje082 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 48 Silnik hybrydowy o magnesach trwały
więcej podobnych podstron