Obraz8�6
f*
L
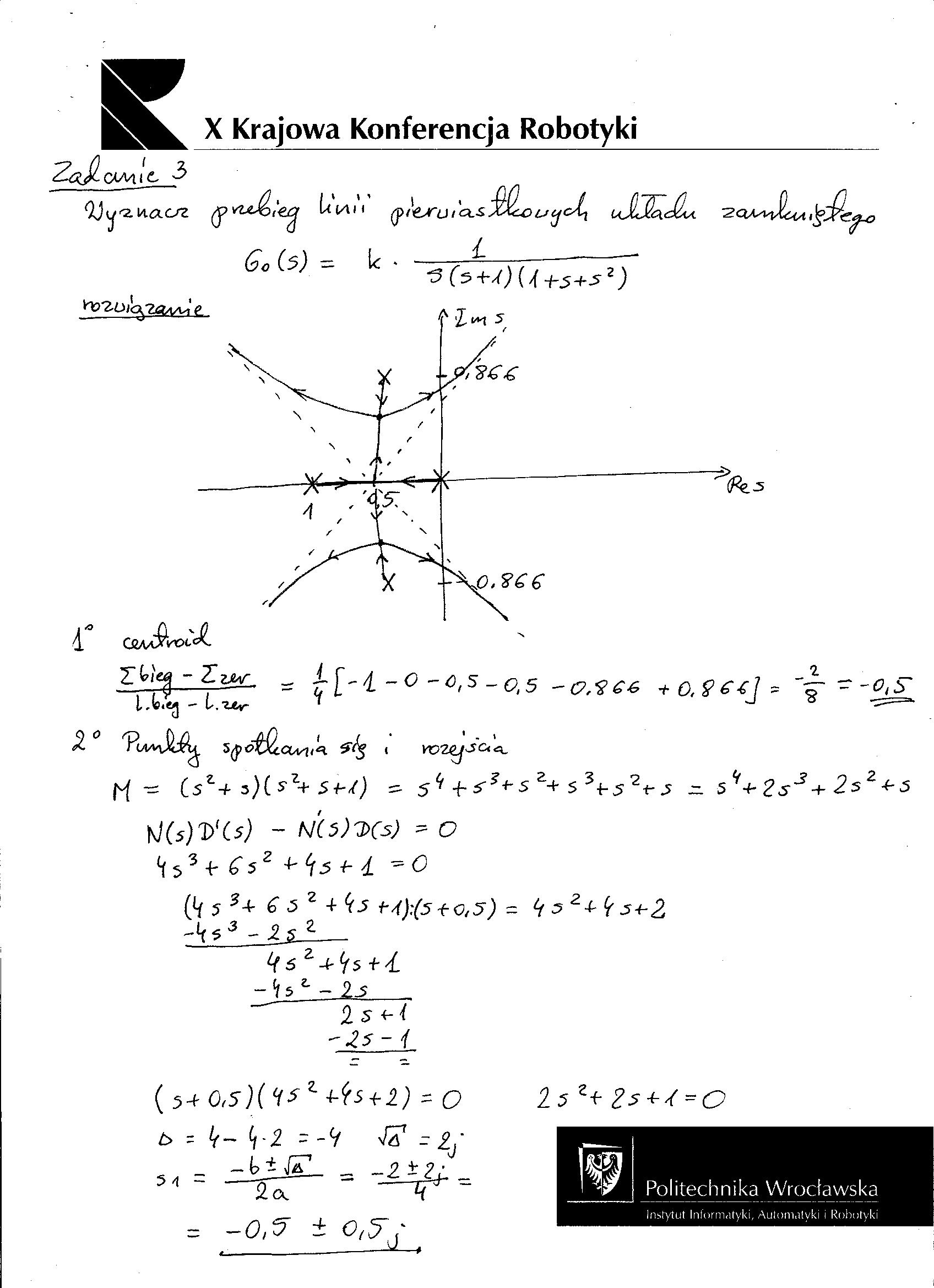
*3 (5 +A) (,f -i-f+s2 )
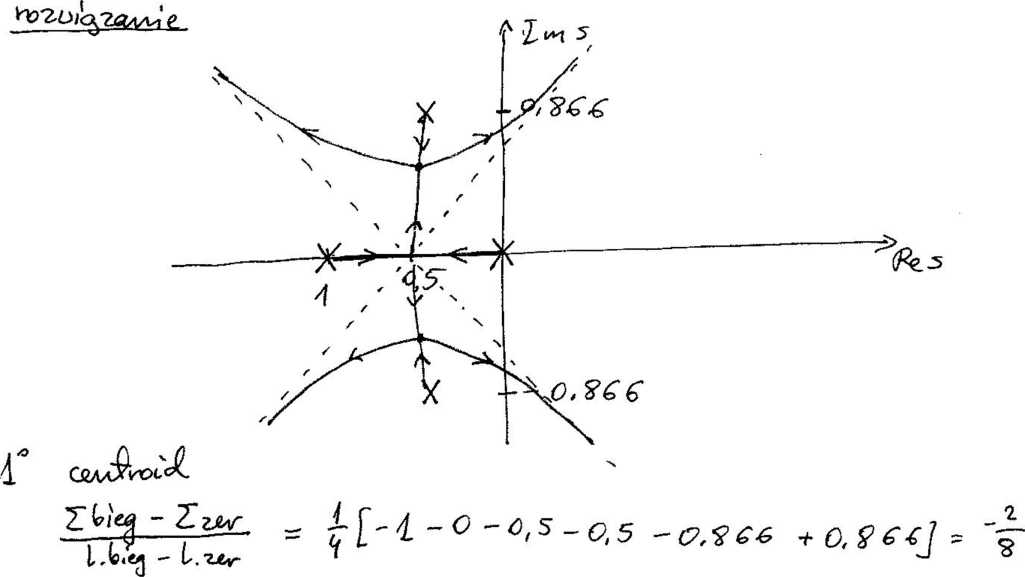
cuąG c yv2y^<^*<^
-= CsZ-b s)i y2+ 5+-/) =■ 5* +^?+-5 2+ S 3f 52t-^ ^ 594-2sS+ 2sZ±5
KJ(s)V'Cs) - N(5)D(s) = C?
‘f 5 3 -t- ^52 -M.5 =<3
(V 5 3+ £ <5 Z + ‘i'.* *-4):(5+ 0,5) = ^ 5 2-(- f .5+-2 -*( $ 3 - i s £
{{ 5Z + (f 5 +<£.
-j S Ł - 2_?
ls *ri
-ALz±
{?>+O^jiis7-^S + 2.) - O

Politechnika Wrocławska
Instytut Informatyki, Automatyki i Robotyki
t> - ^2 = -V : 2 •
,< = =
5' 222 Tf -
-a^ i Q/5~j
Wyszukiwarka
Podobne podstrony:
Obraz8�6 STX Krajowa Konferencja Robotyki 2^JlaM.ic 3oli uJUGJLl f*Go (5) — Ic L *3 (5 +A) (,f -i-
75556 Obraz8�8 STX Krajowa Konferencja Robotyki iAAOcJUL. lX^a£eAA^e z-dbasic ^cJkiiLibvli) (ył^ArcJ
Obraz8�8 STX Krajowa Konferencja Robotyki iAAOcJUL. lX^a£eAA^e z-dbasic ^cJkiiLibvli) (ył^ArcJ
75556 Obraz8�8 STX Krajowa Konferencja Robotyki iAAOcJUL. lX^a£eAA^e z-dbasic ^cJkiiLibvli) (ył^ArcJ
Obraz8�8 STX Krajowa Konferencja Robotyki iAAOcJUL. lX^a£eAA^e z-dbasic ^cJkiiLibvli) (ył^ArcJ
ISD charakterystyka Nyquista strona 1 /STX Krajowa Konferencja Robotyki OAr« Xo leo >0 OwcX<Ą
ISD charakterystyka Nyquista strona 3 STX Krajowa Konferencja Robotykis Łioj2o^ ofi^ro^eM <kj cti
ISD wykreślanie linii pierwiastkowych strona 5 STX Krajowa Konferencja Robotyki b) ■ GL = O.Tj %Jtj
Obraz8�0 EX Krajowa Konferencja Robotyki 0Jijiov^5 Umi /j^&^oia^s^cOLsijcii G{
Obraz9�2 X Krajowa Konferencja Robotyki W/i — Ic ? eC-tf = l G(s) -RCs) - Y(s) == /( . ^ -
13723 Obraz8�2 X Krajowa Konferencja Robotyki lllMl fVOcS^tHoU^^A (Z) CjdL
73286 Obraz8�4 X Krajowa Konferencja Robotyki Zo.^oaa)x_ i- 5Jy2MO.cetjc
więcej podobnych podstron