Slajd75 (9)
AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> nawigacja
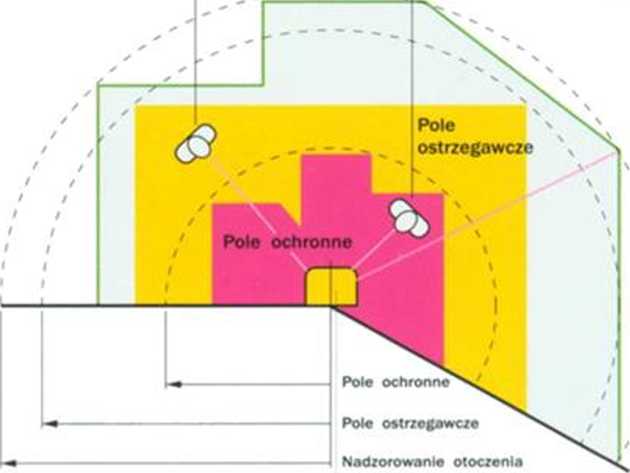
Prowadzenie laserowe - dokończenie:
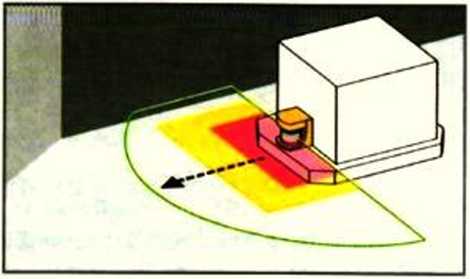
- detektor -> j/w - refleksyjny skaner laserowy.
- ścieżka „2" -> ustalone obiekty wokół robota; robot tworzy mapę otoczenia i na tej podstawie określa położenie w przestrzeni,
- p ro ste p rowa dze n i e „ p rzy ścianie".
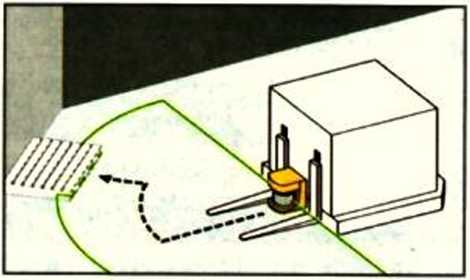
- dobre uzupełnieni innych systemów, np. w przypadku
wjazdu do wnętrza ładowanego pojazdu czy precyzyjnego dojazdu do obiektu,
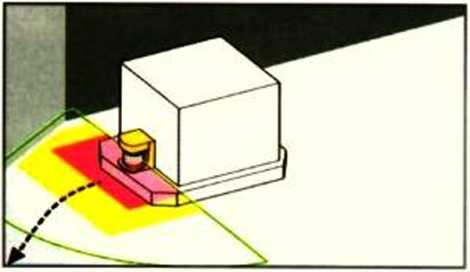
- zmiana ścieżki poruszania nie stanowi większego problemu,
- znaczna elastyczność i duża dokładność poruszania,
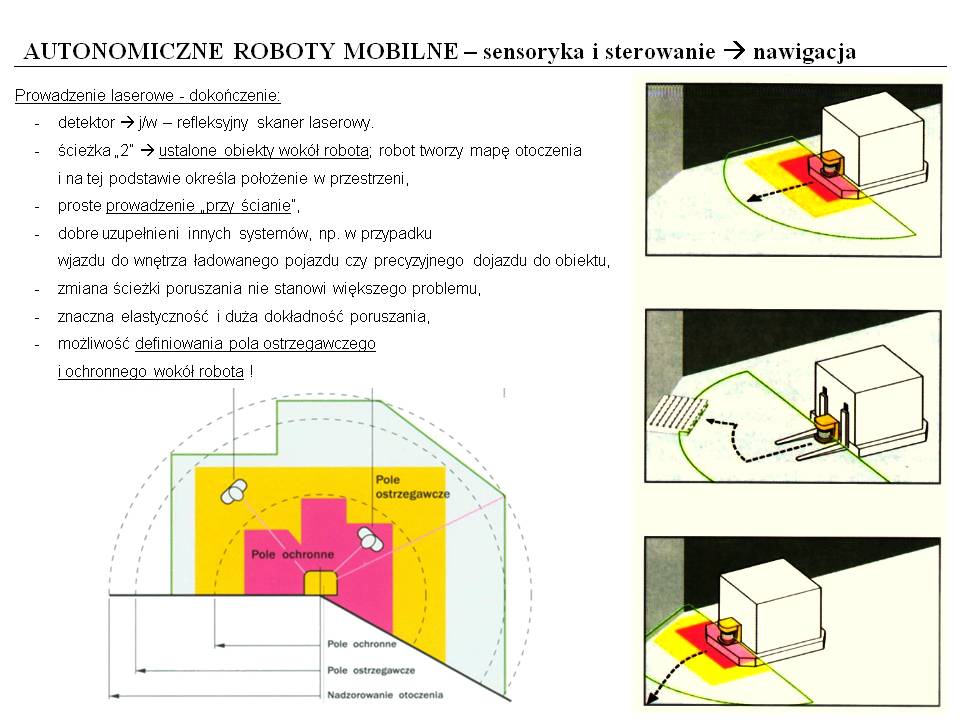
- możliwość definiowania pola ostrzegawczego i ochronnego wokół robota !
Wyszukiwarka
Podobne podstrony:
70014 Slajd74 (10) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie nawigacja Prowadzenie lasero
Slajd71 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> nawigacja Prowadzenie wewnęt
Slajd73 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie nawigacja Prowadzenie nawigacyjne
74767 Slajd72 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> nawigacja Drwing Oirec
59286 Slajd70 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> nawigacja P rowa dze n
89982 Slajd67 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> czujniki Skanery laser
Slajd65 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> czujniki Czujniki mi kro sty
więcej podobnych podstron