skanuj0024 (118)
W schemacie rzeczywistym pręt Z nie istnloje, /ulom
z = o-*z, = o, * =
W równaniu na Z musi istnieć współczynnik przy X; wtedy ustrój wyjściowy jest geometrycznie niezmienny.
Siła w pręcie D2 = X została wyznaczona bezpośrednio, bo pręt ten został wymieniony. Pozostałe siły wyznacza się pośrednio.
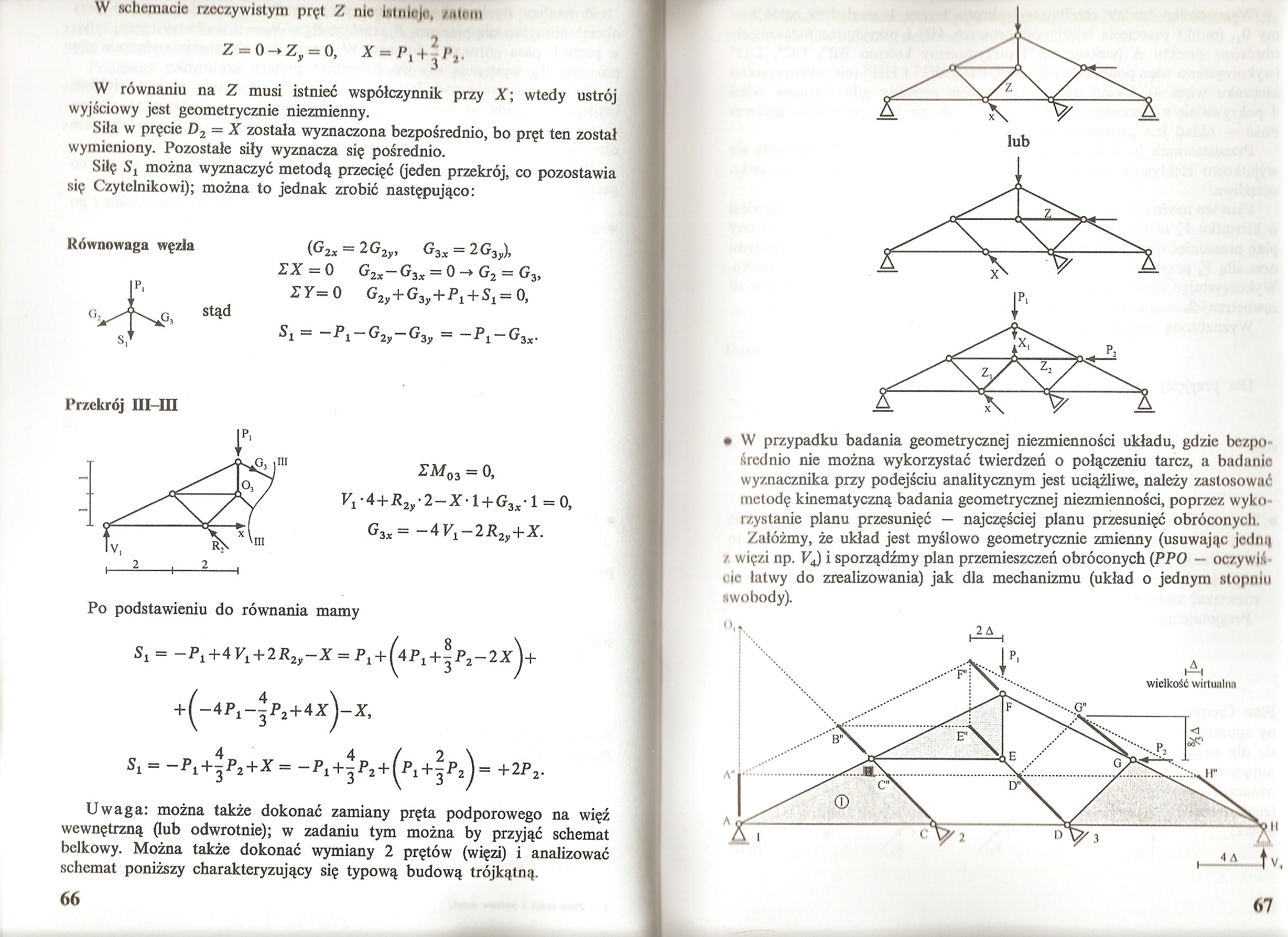
Siłę Si można wyznaczyć metodą przecięć (jeden przekrój, co pozostawia się Czytelnikowi); można to jednak zrobić następująco:
(G2x — 2 G2yt G3x = 2G3y),
ZX = 0 G2x—G3x = o -> g2 = g3, ZY= 0 G2,+G3,+P1+S1= 0,
Si = ~Pi~G2y~G3y = —P i~-G3x.
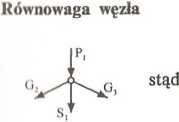
Przekrój ni-m
Po podstawieniu do równania mamy
= -Pl+4Vl+2R2v-X = P1+^4J>1+|p2-2X^+
+(-4i,i-|p2+4^)-X>
«i = -P1Ąp2+X= -P1+lp2 + ^1+|j>^= +2P j.
Uwaga: można także dokonać zamiany pręta podporowego na więź wewnętrzną (lub odwrotnie); w zadaniu tym można by przyjąć schemat belkowy. Można także dokonać wymiany 2 prętów (więzi) i analizować schemat poniższy charakteryzujący się typową budową trójkątną.

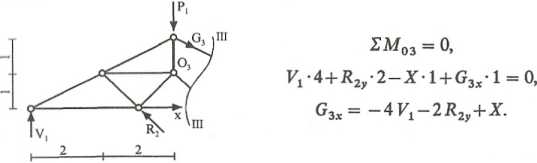
• W przypadku badania geometrycznej niezmienności układu, gdzie bezpośrednio nie można wykorzystać twierdzeń o połączeniu tarcz, a badanie wyznacznika przy podejściu analitycznym jest uciążliwe, należy zastosować metodę kinematyczną badania geometrycznej niezmienności, poprzez wykorzystanie planu przesunięć — najczęściej planu przesunięć obróconych.
Załóżmy, że układ jest myślowo geometrycznie zmienny (usuwając jedną z więzi np. KJ i sporządźmy plan przemieszczeń obróconych (PPG — oczywiście łatwy do zrealizowania) jak dla mechanizmu (układ o jednym stopniu swobody).

67
Wyszukiwarka
Podobne podstrony:
58707 skanuj0019 (118) Jeśli dekoder ma nie wyróżniać żadnego z wyjść, w przypadku gdy na jego wejśc
35530 skanuj0048 (46) schemat 5, który w zestawieniu nie różnicuje obu grup, stosowany jest do badan
skanuj0012 (88) mie, co wkomponowane w nie zdarzenia: białe linie — na przemian bardziej lub mniej —
skanuj0012 (88) mie, co wkomponowane w nie zdarzenia: białe linie — na przemian bardziej lub mniej —
skanuj0013 Mimo to również średniowiecze nie miało jednolitego poglądu na ciało, a już zupełnie nie
skanuj0001?3x1200 «* Czy komizm rzeczywiście naprawia obyczaje, la •prawa. Por. na ten temat wylej,
skanuj0108 211symbol uczestniczy w rzeczywistości, do której odsyła (partycypacja ontyczna), na przy
P1140798 łoby tylko, czy był to skarb luźny, czy też rzeczywiście zakopany na terenie istniejącej ws
P1140798 łoby tylko, czy był to skarb luźny, czy też rzeczywiście zakopany na terenie istniejącej ws
więcej podobnych podstron