M049
Powyższe pozwala określić wielkość współczynnika /', poprzez podstawienie zależności (4.23) oraz (4.25) do wzoru (4.18). Pomnożenie prawej strony równania przez 1000 umożliwia wprowadzenie wyporności statku wyrażonej w tonach:
1,08D 2 g
= 0,7339
I)v'
(4.26)
Stosując odpowiednie wielkości sprawności napędowej r\ oraz sprawności przeniesienia T]w, można określić wartość współczynnika Tx. Podstawiając go następnie do równań (4.20) oraz (4.21), można dowolnie określać prędkość i drogę statku swobodnie zatrzymywanego.
Przyjmując dla dużych pełnotliwych statków następujące wartości [187]: statek załadowany rj = 0,70, statek pod balastem r\ = 0,80 , statek z maszynownią na śródokręciu rj w = 0,97, statek z maszynownią na rufie 77 w = 0,98 ,
można wyprowadzić cztery wzory służące do określania wielkości współczynnika Tx: — dla statku z maszynownią na rufie:
|
załadowanego |
D V3 Tx= 1.0698 — 1 W |
(4.26a) |
|
pod balastem |
D V3 r= 0,9361 X Nw |
(4.26b) |
|
— dla statku z maszynownią |
na śródokręciu: | |
|
załadowanego |
D V3 r = 1,0808 —- N W |
(4.26c) |
|
pod balastem |
D V3 Tx = 0,9457 — * N |
(4.26d) |
W powyższych zależnościach:
D — wyporność statku [t], v — prędkość [m/s],
Nw — moc wytworzona (IHP, BHP, SHP) [KM],
Tx — współczynnik [m].
Wielkość współczynnika Tx określona wzorami (4.26a) do (4.26d) zmienia się w zależ ności od podstawianych prędkości i odpowiadających im wartości mocy wytworzonej. Stosując więc wartość Tx do zależności (4.20) i (4.21), konieczne jest wyznaczenie wielkości średniej z trzech różnych prędkości w odstępach 2,0 do 3,0 węzłów.
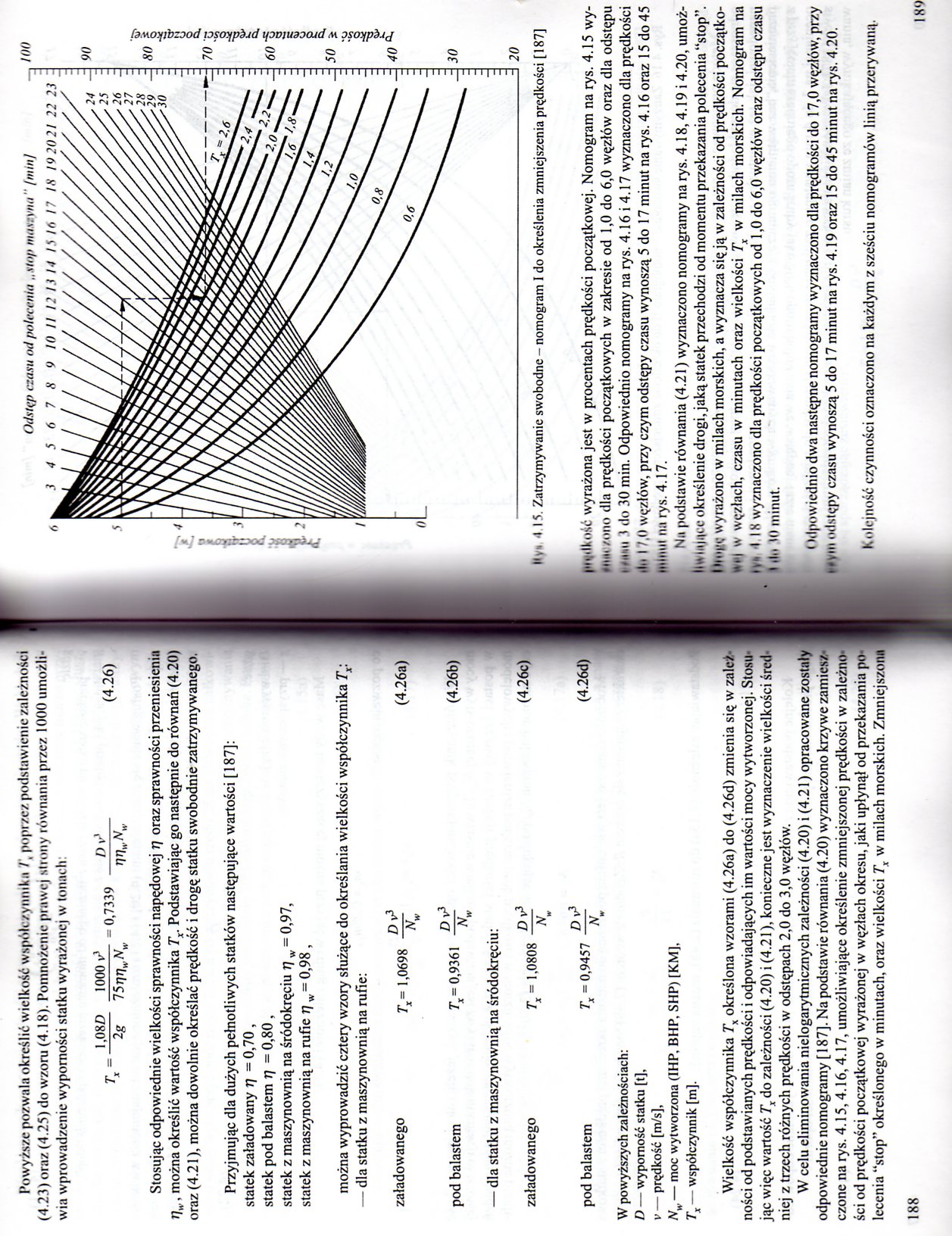
W celu eliminowania nielogarytmicznych zależności (4.20) i (4.21) opracowane zostały odpowiednie nomogramy [ 187]. Na podstawie równania (4.20) wyznaczono krzywe zamieszczone na rys. 4.15,4.16,4.17, umożliwiające określenie zmniejszonej prędkości w zależno ści od prędkości początkowej wyrażonej w węzłach okresu, jaki upłynął od przekazania po lecenia “stop” określonego w minutach, oraz wielkości Tx w milach morskich. Zmniejszona
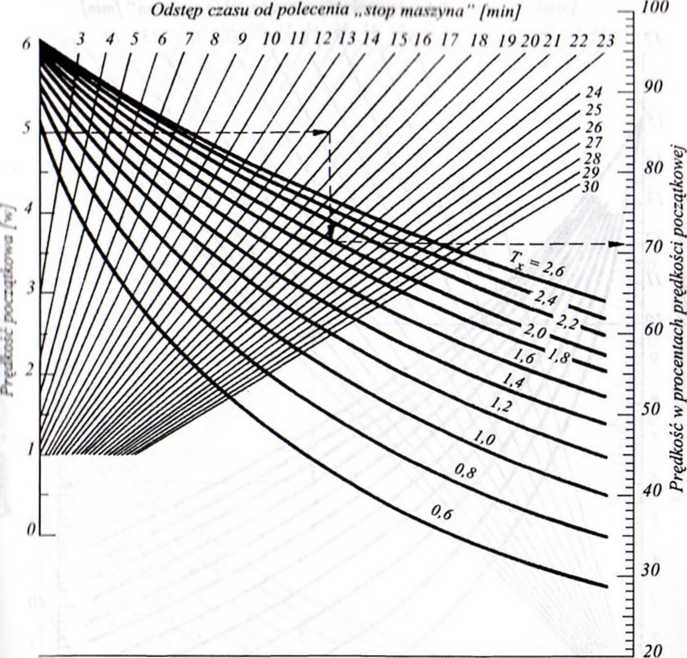
I'. . 4,15. Zatrzymywanie swobodne - nomogram I do określenia zmniejszenia prędkości [187]
l'ii,ilkość wyrażona jest w procentach prędkości początkowej. Nomogram na rys. 4.15 wy-0MHI /ono dla prędkości początkowych w zakresie od 1,0 do 6,0 węzłów oraz dla odstępu i < .l iii I do 30 min. Odpowiednio nomogramy na rys. 4.16 i 4.17 wyznaczono dla prędkości •In I /,0 węzłów, przy czym odstępy czasu wynoszą 5 do 17 minut na rys. 4.16 oraz 15 do 45 itilinil na rys. 4.17.
Na podstawie równania (4.21) wyznaczono nomogramy na rys. 4.18,4.19 i 4.20, umoż-||Wlii|i|cc określenie drogi, jaką statek przechodzi od momentu przekazania polecenia “stop”. I >in||ę wyrażono w milach morskich, a wyznacza się ją w zależności od prędkości początko-««11 w węzłach, czasu w minutach oraz wielkości Tx w milach morskich. Nomogram na t, „ I IK wyznaczono dla prędkości początkowych od 1,0 do 6,0 węzłów oraz odstępu czasu i .In l() minut.
i Mpowiednio dwa następne nomogramy wyznaczono dla prędkości do 17,0 węzłów, przy Vin odstępy czasu wynoszą 5 do 17 minut na rys. 4.19 oraz 15 do 45 minut na rys. 4.20.
kolejność czynności oznaczono na każdym z sześciu nomogramów linią przerywaną.
189
Wyszukiwarka
Podobne podstrony:
M049 Powyższe pozwala określić wielkość współczynnika l poprzez podstawienie zależności (4.23) oraz
• Informacyjno - bodźcowa - parametru, który pozwala określić wielkość przychodów
DSC00033 Efektywne ciśnienie filtracyjne (EFP) określa wielkość filtracji klębuszkowej (GFR) a zależ
stany nieustalone str22 Na podstawie zależności analitycznych oraz wykresów stwierdzamy, że w przypa
Podstawy miernictwa Miernik - przyrząd pozwalający określić wartość mierzonej wielkości (np. napięci
272 ARTYKUŁY Przystąpienie do retrokonwersji musi poprzedzać: określenie jej celu, określenie wielko
P1080588 Sondowania, pozwalają określić parametry gruntów podłoża na podstawie wskaźników oporu staw
Slajd2 CPM Pojęcia podstawowe Metoda CPA pozwala określić drogę krytyczną w sieci czynności opisując
099 3 F 6 Rys. 66. Wykres biegunowy ramion stateczności dynamicznej Poprzez określanie wielkości / d
Współczynnik q-Tobina Współczynnik q-Tobina pozwala określić poziom pożądanego kapitału przy
CCF20071228�024 .„flS Zadanie 1. Na podstawie danych o wydajności krów określ wielkość różnicy selek
38 W powyższych rozważaniach określono współczynnik proporcjonalności 5 jako niezależny od stałej
5. Unormowany wykres OWR Zastosowanie unormowanego wykresu OWR pozwala na określenie wielkości badan
10015085Q2787635497927?3755804 o Przekształcając powyższe równanie, możemy otrzymać formułę określaj
Slajd6 (5) PODSTAWOWE CZYNNIKI OKREŚLAJĄCE WIELKOŚĆ POPYTU NA PRACĘ Wysokość płac realnych Wielkość
więcej podobnych podstron