napmasz05
42
Bezstopniową zmianę prędkości obrotowej-uzyskuje się przez:
- zmianę napięcia zasilania Uj (rys. 4.5} przy ustalonym strumieniu ma-l gnetycznym $ wzbudzania. Sposób ten wymaga źródła .prądu stałego]
a)

M s c onsi 'i
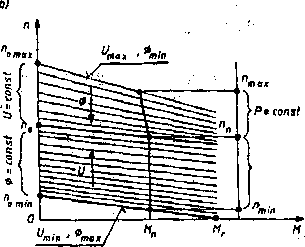
Rys. 4.5. Silnik prądu stałego bocznikowy obcowzbudny: a) schemat zasilania silnika; b) chara* i kterystyka mechaniczna silnika oraz zakresy regulacji prędkości obrotowej przy stałym momen-4
cie i stałej mocy J
o regulowanym napięciu, które można jedynie zmniejszyć w stosunku do 1 napięcia znamionowego. Zmniejszając napięcie t/, przy stałym oporze ! twornika Rt i stałym strumieniu magnetycznym $, uzyskuje się różne ] prędkości obrotowe silnika, od rtmia do nn, a ściślej, obniża się prędkość | obrotową silnika, zaś moment obrotowy , w całym zakresie prędkości jest! stały. Regulację prędkości obrotowej silnika napięciem twornika nazywa się regulacją przy stałym momencie,
zmianę strumienia wzbudzania przy stałym napięciu. Zmniejszenie strumienia wzbudzania powoduje wzrost prędkości obrotowej silnika od nn do (nn»«/nn ^ 3). Regulacja prędkości obrotowej silnika zmianą pola magnetycznego jest regulacją ptzy stałej mocy.
4.2.5. Silnik prądu stałego z magnesami trwałymi
Jest to silnik o charakterystyce stałego momentu, ponieważ stojan jest wykonany z segmentów magnetycznych, wytwarzających stały strumień magnetyczny. Jest szczególnie przydatny do napędu posuwów z bezstopniową zmianą prędkości w obrabiarkach sterowanych numerycznie. Są to silniki serwomechanizmowe, o dobrych właściwościach dynamicznych, mają moment szczytowy, małą stałą czasową elektryczną i mechaniczną. Są to silniki wol-
noobrotowe; < 2000 obr/min o stałym Wzbudzaniu wytwarzanym przez magnesy Uwałe;' ' . ...u- .
Magnesy umożliwiają przeciążenie prądowe silnika, dzięki czemu krótkotrwałe momenty: rozruchowy i hamowania, mogą być 8 razy większe od momentu znamionowego. • -
W silnikach tych liczba biegunów magnetycznych może wynosić do 12, co umożliwia uzyskanie na wale silnika małej prędkości i'dużego momentu obrotowego. Pozwala to na bezpośrednie łączenie silnika ze śrubą pociągową napędzanego zespołu roboczego (rys. 4.6). Silnik ten zawiera:

Rys. 4.6. Schemat napędu zespołu roboczego maszyny technologicznej z zastosowaniem silnika prądu stałego, połączonego bezpośrednio z przekładnią śrubową toczną: E — silnik, SP — śruba pociągowa toczna, ZR - zespół roboczy, ly — prędkość ruchu posuwowego zespołu

- prądnicę tachometryczną, która wytwarza sygnał napięciowy proporcjonalny do prędkości obrotowej wirnika,
- transformator położenia kątowego zwany resolwercm, połączony bezluzo-wo z walem wirnika. Resolwer spełnia rolę czujnika pomiarowego. Silniki te w czasie rozruchu i hamowania mogą rozwijać krótkotrwale momenty do 8 razy większe od momentu znamionowego.
4.2,6. Układy napędowe
Zastosowanie do napędu zespołów roboczych maszyn technologicznych — szczególnie obrabiarek skrawających sterowanych numerycznie — silników prądu stałego, wymaga zastosowania dodatkowych maszyn i urządzeń elektrycznych, służących do zasilania i regulacji silnika. Zespół takich maszyn i urządzeń nazywa się układem napędowym.
Stosuje się układy:
- Ward-Leonarda, tyrystorowy.
W napędach tyrystorowych, prąd stały potrzebny do zasilania silnika otrzymuje się za pomocą prostownika tyrystorowego, podłączonego do sieci prądu trójfazowego.
Wyszukiwarka
Podobne podstrony:
napmasz05 42 f Bezstopniową zmianę prędkości obrotowej, uzyskuje się przez: - zmianę napięcia zasila
instrukcja 9#6 Zmiany prędkości obrotowej należy korygować przez regulację napięcia zasilania silnik
instrukcja 9#6 Zmiany prędkości obrotowej należy korygować przez regulację napięcia zasilania silnik
instrukcja 9#6 Zmiany prędkości obrotowej należy korygować przez regulację napięcia zasilania silnik
predkosc obrotowa sil jedn , _u-iz n=—=—C$m U - napięcie zasilania I - prąd obciążenia Z - impe
silnik asynchroniczny klatkowy3 Zmianę kierunku obrotów silnika uzyskuje się przez zmianę kierunku w
3. Regulacja prędkości obrotowej. Możliwość regulacji prędkości obrotowej uzyskujemy przez zmianę
powietrznej, uzyskuje się przez zmianę kąta otwarcia przepustmcy. Skład mieszanki paliwowo -powietrz
Zmieniając obciążenie, ciągle przy stałej prędkości obrotowej, wykonuje się kolejne pomiary, co pozw
P1180873 Obiekt zamknięty Hydrostatyczny napęd jazdy - bezstopntowe ustawienie prędkości obrotowej -
arcz 68 pojemności skokowej, przez zwiększenie stopnia sprężania i prędkości obrotowej, wiąże się ni
Wprowadzenie światło. Pola prędkości przepływu uzyskuje się z analizy zarejestrowanych obrazów
DSCN2693 (2) w ZALEŻNOŚCI OD TEMPERATURY DOKŁADNOŚĆ WSKAZAŃ PRĘDKOSCIOMIERZA-OBROTOMIERZA WAHA SIĘ O
Image300 Kod „4-3” oraz kod Aikena są kodami samouzupełniającymi, w których uzupełnienie do 9 uzysku
Image479 W układzie przedstawionym na rys. 4.599c odpowiednią wartość rezystancji obwodu RC uzyskuje
Zdj?cie0982 Nawozy o spowolnionym działaniu Spowolnienie działania nawozu uzyskuje się przez: a Kond
Zdj?cie0983 Nawozy o spowolnionym działaniu Spowolnienie działania nawozu uzyskuje się przez: a
więcej podobnych podstron