P1080195
2. Definicje i klasyfikacja robotów przemysłowych
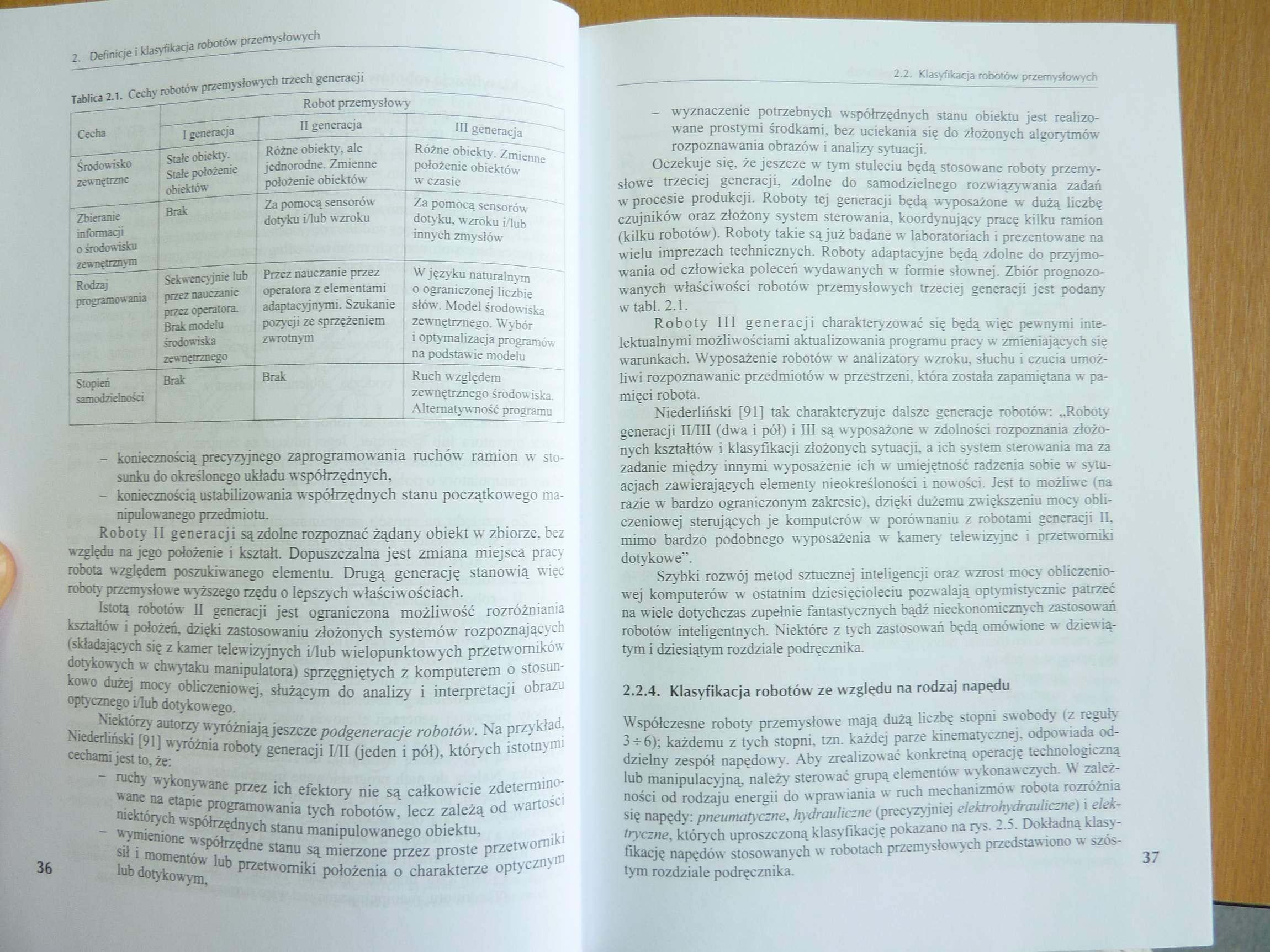
Tablica 2.1. Cechy robotów przemysłowych trzech generacji
|
I Cecha |
Robot przemysłowy | ||
|
I generacja |
U generacja |
III generacja | |
|
i Środowisko ZĆWD^tlZOC |
, Stałe obiekty. Stałe położenie . obiektów |
1 Różne obiekty, ale I jednorodne. Zmienne 1 położenie obiektów |
1 Różne obiekty. Zmienne 1 położenie obiektów I w czasie |
|
Zbieranie informacji o środowiska zewnętrznym |
| Brak |
! Za pomocą sensorów 1 dotyku i/lub wzroku |
1 Za pomocą sensorów f dotyku, wzroku i/lub I innych zmysłów |
|
Rodzaj programowania ' |
Sekwencyjnie łub i przez nauczanie przez operatora. Brak modelu środowiska zewnętrznego |
! Przez nauczanie przez operatora z elementami adaptacyjnymi. Szukanie pozycji ze sprzężeniem zwrotnym |
1 W języku naturalnym 0 ograniczonej liczbie słów. Model środowiska zewnętrznego. Wybór 1 optymalizacja programów na podstawie modelu |
|
Stopień samodzielności |
Brak |
Brak |
Ruch względem zewnętrznego środowiska. Alternatywność programu |
- koniecznością precyzyjnego zaprogramowania ruchów ramion w stosunku do określonego układu współrzędnych,
- koniecznością ustabilizowania współrzędnych stanu początkowego manipulowanego przedmiotu.
Roboty II generacji są zdolne rozpoznać żądany obiekt w zbiorze, bez względu na jego położenie i kształt. Dopuszczalna jest zmiana miejsca pracy robota względem poszukiwanego elementu. Drugą generację stanowią więc roboty przemysłowe wyższego rzędu o lepszych właściwościach.
Istotą robotów n generacji jest ograniczona możliwość rozróżniania kształtów i położeń, dzięki zastosowaniu złożonych systemów rozpoznających (składających się z kamer telewizyjnych i/lub wielopunktowych przetworników dotykowych w chwytaku manipulatora) sprzęgniętych z komputerem o stosunkowo dużej mocy obliczeniowej, służącym do analizy i interpretacji obrazu optycznego i lub dotykowego.
Niektórzy autorzy wyróżniają jeszcze podgeneracje robotów. Na przykład. Niederlióski [91] wyróżnia roboty generacji I/II (jeden i pół), których istotnymi cechami jest to, że:
- ruchy wykonywane przez ich efektory nie są całkowicie zdeterminowane na etapie programowania tych robotów, lecz zależą od wartości niektórych współrzędnych stanu manipulowanego obiektu,
- wymienione współrzędne stanu są mierzone przez proste przetworniki sił i momentów lub przetworniki położenia o charakterze optycznym
36 lub dotykowym,
— wyznaczenie potrzebnych współrzędnych stanu obiektu jest realizowane prostymi środkami, bez uciekania się do złożonych algorytmów rozpoznawania obrazów i analizy sytuacji.
Oczekuje się, że jeszcze w tym stuleciu będą stosowane roboty przemysłowe trzeciej generacji, zdolne do samodzielnego rozwiązywania zadań w procesie produkcji. Roboty tej generacji będą wyposażone w dużą liczbę czujników oraz złożony system sterowania, koordynujący pracę kilku ramion (kilku robotów). Roboty takie są już badane w laboratoriach i prezentowane na wielu imprezach technicznych. Roboty adaptacyjne będą zdolne do przyjmowania od człowieka poleceń wydawanych w formie słownej. Zbiór prognozowanych właściwości robotów przemysłowych trzeciej generacji jest podany w tabl. 2.1.
Roboty III generacji charakteryzować się będą więc pewnymi intelektualnymi możliwościami aktualizowania programu pracy w zmieniających się warunkach. Wyposażenie robotów w analizatory wzroku, słuchu i czucia umożliwi rozpoznawanie przedmiotów w przestrzeni, która została zapamiętana w pamięci robota.
Niederliński [91] tak charakteryzuje dalsze generacje robotów: ^Roboty generacji II/III (dwa i pół) i III są wyposażone w zdolności rozpoznania złożonych kształtów i klasyfikacji złożonych sytuacji, a ich system sterowania ma za zadanie między innymi wyposażenie ich w umiejętność radzenia sobie w sytuacjach zawierających elementy nieokreśloności i nowości. Jest to możliwe (na razie w bardzo ograniczonym zakresie), dzięki dużemu zwiększeniu mocy obliczeniowej sterujących je komputerów w porównaniu z robotami generacji n, mimo bardzo podobnego wyposażenia w kamery telewizyjne i przetworniki dotykowe”.
Szybki rozwój metod sztucznej inteligencji oraz wzrost mocy obliczeniowej komputerów w ostatnim dziesięcioleciu pozwalają optymistycznie patrzeć na wiele dotychczas zupełnie fantastycznych bądź nieekonomicznych zastosow ań robotów inteligentnych. Niektóre z tych zastosowań będą omówione w dziewiątym i dziesiątym rozdziale podręcznika.
2.2.4. Klasyfikacja robotów ze względu na rodzaj napędu
Współczesne roboty przemysłowe mają dużą liczbę stopni swobody (z reguły 3 6); każdemu z tych stopni, tzn. każdej parze kinematy cznej, odpowiada oddzielny zespół napędowy. Aby zrealizować konkretną operację technologiczną lub manipulacyjną, należy sterować grupą elementów wykonawczych. W zależności od rodzaju energii do wprawiania w ruch mechanizmów robota rozróżnia się napędy: pneumatyczne, hydrauliczne (precyzyjniej elektrohydrauliczne) i elektryczne, których uproszczoną klasyfikację pokazano na rys. 2.5. Dokładną klasyfikację napędów stosowanych w robotach przemysłowych przedstawiono w szóstym rozdziale podręcznika.
37
Wyszukiwarka
Podobne podstrony:
P1080192 (2) 2. Definicje i klasyfikacja robolów przemysłowych 2.2.1. Klasyfikacja robotów ze względ
P1080193 2. Definicje i klasyfikacja robotów przemysłowych względem podstawy. Konfiguracja cylindryc
P1080196 2. Definicje i klasyfikacja robotów przemysłowych Rysunek 2^_______ Klasyfikacja robotów ze
P1080194 (2) 2. Definicje i klasyfikacja robotów przemysłowych Ze względu na rozwiązania kinematyczn
P1080191 (2) 2Definicje i klasyfikacja robotów przemysłowych2.1. Definicje podstawowe Do dalszych ro
HPIM0759 <k> l^ca Ic zr*Qf,Definicje i klasyfikacja robotów przemysłowych L2.1. Definicje pods
HPIM0760 2. Definicje i klasyfikacja robotów przemysłowych Według Moreckicgo [62] „robot to urządzen
więcej podobnych podstron