P1080199

lywndl U
Kobe1 fĄNUC M-IOMAj im [4€\
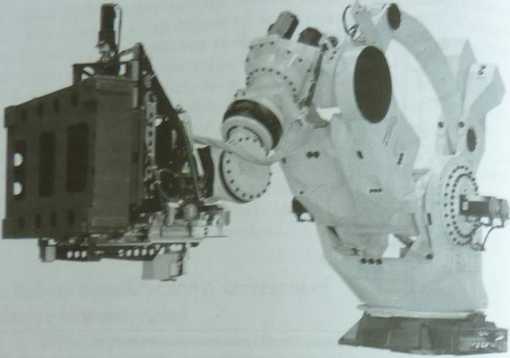
Na EMO 2009 był prezentowany największy na świecie robot przegubowy firmy Famie M-2000iA/ł209 - rys, 3.3, Jako najsilniejszy na świecie robot został wpisany do Księgi Rekordów Guinnessa, Robot ten pobił swoimi parametrami dotychczasowego rekordzistę - robota KUKA RK 1909 than. Oto charakterystyka robota M-2000iA/l290:
- napęd elektryczny w 6 stopniach swobody,
- może swobodnie manewrować ładunkiem o masie 1350 kg, którego środek ciężkości znajduje się w odległości 9,6 m od nadgarstka robota lub o masie 1299 kg, którego środek ciężkości znajduje się w odległości 1 m od nadgarstka robota,
- może podnieść ładunek na wysokość 6,2 m.
- ma nadgarstek pyłoszczefny i wodoszczelny w standardzie IP-67,
Robot M'2900iA został zaprojektowany do operowania ładunkami, do
podnoszenia których wykorzystywano niegdyś kilka zsynchronizowanych robotów, przenośniki łab windy.
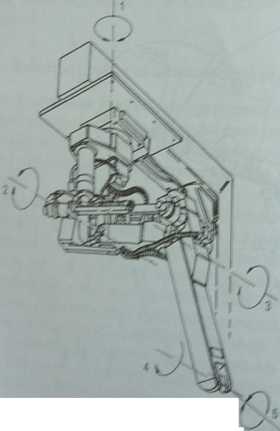
Roboty przegubowe są również oferowane w wersji podwieszonej. Przykładem może tu być robot z pięcioma sterowanymi ostami, pokazany na rys, 3.4, Jest on napędzany silnikami prądu stałego.
3.2.2. Roboty o strukturze kinematycznej sferycznej
Robot w układzie sferycznym o jednym liniowym oraz dwóch obrotowych zespołach ruchu regionalnego jest przedstawiony na rys. 3.5,
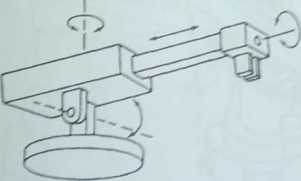
Rywne* 3.5_
Rcitowt & krmftgnrzcji sferycznej f l: 15]
Przykładem manipulatora o takiej konfiguracji jest manipulator Stanforda. Przestrzeń robocza manipulatora sferycznego jest przedstawiona na rys. 3.6. fest to konfiguracja o biegunowym układzie osi współrzędnych oraz sferycznych przestrzeniach ruchu.
VHmk%A
n1PP Wafc) z zaznaczonymi osłami
Wyszukiwarka
Podobne podstrony:
Mówi: „Chłopcy tedy, jak chłopcy- zawsze im lepiej na świecie" - Orzeszkowa się z tym nie godzi
Mówi: „Chłopcy tedy, jak chłopcy- zawsze im lepiej na świecie" - Orzeszkowa się z tym nie godzi
image036 IM i rwo na to ostateczne osiągnięcie człowieka pełne oświecenie Pierwszym krokiem do oświe
image036 IM i rwo na to ostateczne osiągnięcie człowieka pełne oświecenie Pierwszym krokiem do oświe
Zdjŕcie2 20 a iwiMdc**r>iM publłamuprawtie na b) rfwJadcmnln pubhccntiptawne na
img067 (7) że ktoś / rodziców próbował udzielić im instrukcji na temat) seksualne, a pozostałe 2:V/ć
skanuj0089 (30) 158 B. Cieślar Przedział III - z e (0;2), M(z)= -Pz = -4z; na rys. 4.13.2b,c. M(0)=
Luty 1957 35 lepiej jest żywiona, czyli im gleba, na której rośnie, zasobniejsza jest w składniki po
IMG!64 (4) • Im względu na jakie kryteria można dokonywać wyodrębnień* podsta
Im bardziej na południe, tym większy zysk energii słonecznej. Typowe wartości dla Wielkiej Brytanii
więcej podobnych podstron