p2 (19)
2. Modele matematyczne układów regulacji
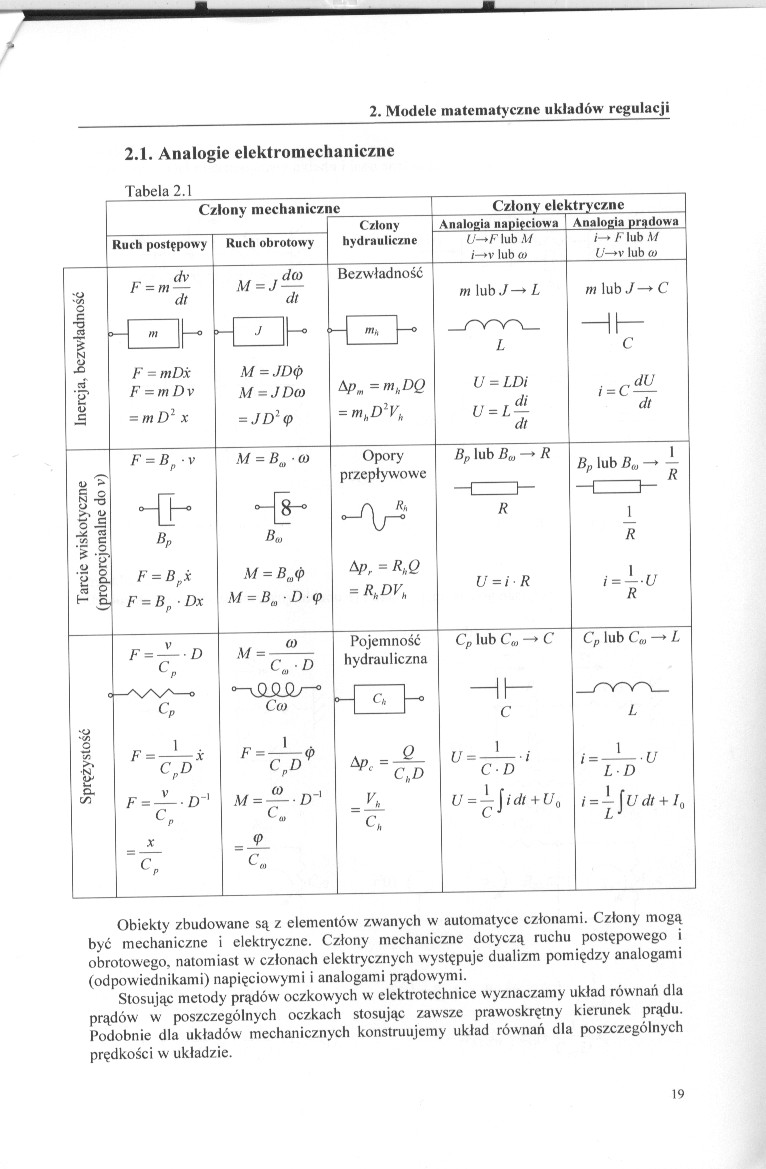
2.1. Analogie elektromechaniczne
Tabela 2.1
Człony mechaniczne
Człony elektryczne
Ruch postępowy
Ruch obrotowy
Człony
hydrauliczne
Analogia napięciowa
U—+F lub M i—*v lub O)
Analogia prądowa
/—* F lub M
U—*v lub (o
dco
M = J — dt
Bezwładność
c
-o
P3
i
r3
4>
C
dv
r = m — dt
|
ni |
J
F = mDx F = m D v
= mD2 x
M = JD<p M = JDco
= JD1 (p
&Pm = ">*DQ
= ">>DX
m lub./—♦ L L
U = LDi
U = L — dt
m lub./—C
C
i = C — dt
F = B-v
M = B„ • (O
F = Bpx F = BpDx
Bl0
M = B^cp M = Ba ■ D <p
/i;, lub Z?w —* /?
—C
3-
R
U = i R
Bp lub Bu — —
H=l- *
j_
R
i = — ■ U R
O)
C„
M =
Cco
Pojemność
hydrauliczna
Cn lub C« — C
Cn lub C(0 —► Z.
■N
CL
t/j
F =
V D-1
P
F =--D
C
x
Ć~
F =
<p
A/ = — - £)"'
C.
= J>
c.
(/ =
CD
U=Fjidt + U(
l =
LD
i = ~jifdt + /0
Obiekty zbudowane są z elementów zwanych w automatyce członami. Człony mogą być mechaniczne i elektryczne. Człony mechaniczne dotyczą ruchu postępowego i obrotowego, natomiast w członach elektrycznych występuje dualizm pomiędzy analogami (odpowiednikami) napięciowymi i analogami prądowymi.
Stosując metody prądów Oczkowych w elektrotechnice wyznaczamy układ równań dla prądów w poszczególnych oczkach stosując zawsze prawoskrętny kierunek prądu. Podobnie dla układów mechanicznych konstruujemy układ równań dla poszczególnych prędkości w układzie.
19
Wyszukiwarka
Podobne podstrony:
p3 (17) 2. Modele matematyczne układów regulacji Przykład 2.1 /budować model matematyczny układu i j
s10 (23) 2. Modele matematyczne układów regulacji C.,D J, D + Bw2 + I C„D +co,=M(r)Cu,z) C^D(0,- C^D
s11 (24) 2. Modele matematyczne układów regulacji Przykład 2.14 Zbudować model matematyczny obiektu
p4 (13) 2. Modele matematyczne układów regulacji2.2. Metoda prądów Oczkowych (II prawo Kirchoffa) Dr
68279 p6 (7) 2. Modele matematyczne układów regulacji I = G(D)= D 1 gdzie T = JZ
57484 p5 (7) 2. Modele matematyczne układów regulacji Przykład 2.5 Zbudować model matematyczny i wyz
69275 p1 (20) 2. Modele matematyczne układów regulacji2. MODELE MATEMATYCZNE UKŁADÓW REGULACJI Rys.
więcej podobnych podstron