P1110753
Na sterowanie kombajnem 4PU składu su; sterowanie; —■ układem elektrycznym,
—■ układem hydraulicznym.
Sterowanie układem elektrycznym
Sterowanie układem elektrycznym polega na załączaniu lub wyłączaniu odpowiednich silników elektrycznych napędzających poszczególne zespoły. Kombajn 4PU napędzany jest (wersja z hydraulicznym napędem podwozia) trzema silnikami elektrycznymi:
— o mocy 22 kW do napędu organu urabiającego,
— o mocy 13 kW do napędu poda war ki i łap,
— o mocy 13 kW do napędu pompy hydraulicznej.
Sterowanie układem hydraulicznym
Układem hydraulicznym steruje się za pomocą pięciu dźwigni pokazanych na rys. 65 i służących do sterowania:
— ruchami pionowymi i poziomymi organu urabiającego,
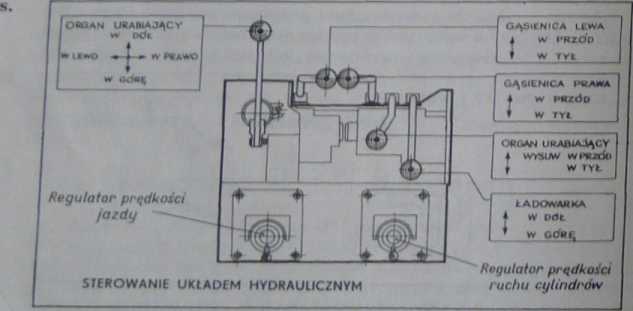
— lewą gąsienicą,
— prawą gąsienicą,
— wysuwem organu urabiającego,
— podnoszeniem i opuszczaniem głowicy ładującej.
Ponudto na pulpicie sterowania znajdują się: dźwignia blokady podwozia oraz dwu zawory dławiące regulacji prędkości jazdy i ruchów cylindrów.
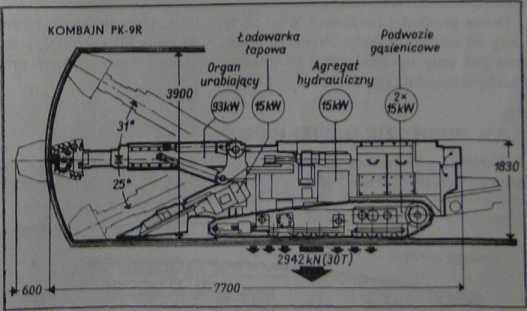
KOMBAJN CHODNIKOWY PK-9R
Prototyp kombajnu PK-9R, zaprojektowany przez Giprouglemasz w Moskwie, został zbudowany w 1963 r. i po kilku latach prób i badań znalazł się w produkcji seryjnej. Kombajn ten, jako większa i mocniejsza wersja kombajnu PK-7, przeznaczony jest do drążenia chodników węglowych i węglowo-kamiennych w węglu i skalach o wytrzymałości do 40 MPa (400 kG/cm*). Kombajnem tym można wykonywać wyrobiska, kjtórych wysokość w wyłomie wynosi 2,2 do 3,9 m, szerokość 3,2 do 5,8 m, n więc o przekroju 7 do 16 m*, przy czym przekrój wyrobiska może mieć kształt dowolny. Kombajn przystosowany jest do pracy w chodnikach o| nachyleniu do ;fcl0°.
Ry».
66
8.1. ORGAN URABIAJĄCY
Budowa organu urabiającego, Jego podział na zespoły; jak i dziabnie jest podobne do organu kombajnu 4PU. Zasadniczą różnicą jest związana 97 1 _ Kombajny chodnikowe
Wyszukiwarka
Podobne podstrony:
P1110759 (2) na w rozdziale o kombajnie AM-50; w tym rozdziale zostaną podane tylko zasadnicze różni
Rozwiązanie to pozwala na sterowanie obiektem nieliniowym za pomocą funkcji liniowych. Można stworzy
HPIM0763 I. Oln*jp i Uas)6icaąj idbati* ęrntaiyshwyói 2.2.3. Klasyfikacja robotów ze względu na ster
napędy i sterowanieWykonanie i sterowanie układem stabilizacji obiektu na równi pochyłej 1.
61360 P1110767 na urobku. Wodę do urządzenia zraszającego mocowanego na kombajnie doprowadza się z r
MONOGRAFIA504 Zorientowany na sterowanie model ruchu oraz neuro-ewolucyjno-rozmyta metoda sterowania
Grafika 3D - Efekty specjalne •S Mgła (fog) - polega na sterowaniu współczynnikiem przejzystości tek
20090223(001) Kierowanie czynnością organizmu polega na: • Sterowaniu (jednokierun
Literatura [1] W. Adamski, Logika rozmyta - pomysł na sterowanie, Automatyka B2B,
Klasyfikacja robotów ze względu na sterowanie: • roboty sekwencyjne - roboty z sekwencyjnym układem
więcej podobnych podstron