36297 instalacje083
2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 50
Wadą hybrydowego silnika skokowego jest duża bezwładność wirnika. W silniku tym występują duże siły osiowe, działające na łożyska.
Oto przykładowe dane jednego z wykonań hybrydowego silnika skokowego o mocy 8,7 W: liczba pasm — 4; wartość skoku — 1,8°; maksymalny moment roboczy — 380mN-m; masa — 0,6 kg; moment bezwładności wirnika — lT0_5kg-m2; siła osiowa działająca na łożysko — - 20 N.
2.5. Liniowe silniki skokowe
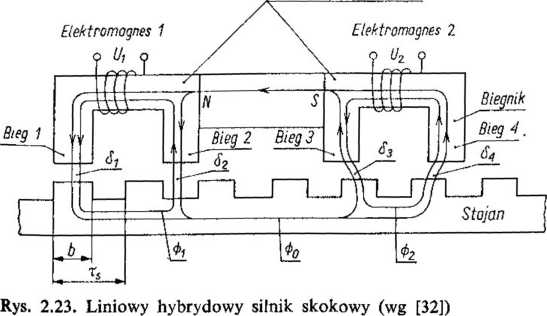
Najczęściej są stosowane liniowe silniki skokowe reluktancyjne (rys. 2.22a) i hybrydowe (rys. 2.22b), rzadziej elektrodynamiczne (rys. 2.22c).
Liniowy reluktancyjny silnik skokowy jest odpowiednikiem wielosegmentowego, wirującego reluktancyjnego silnika skokowego. Zarówno rdzeń stojana, jak i biegnika są wykonane z blachy elektrotechnicznej. Taki trójpasmowy, liniowy silnik skokowy był np. stosowany przez firmę IBM do napędu karetki w drukarce.
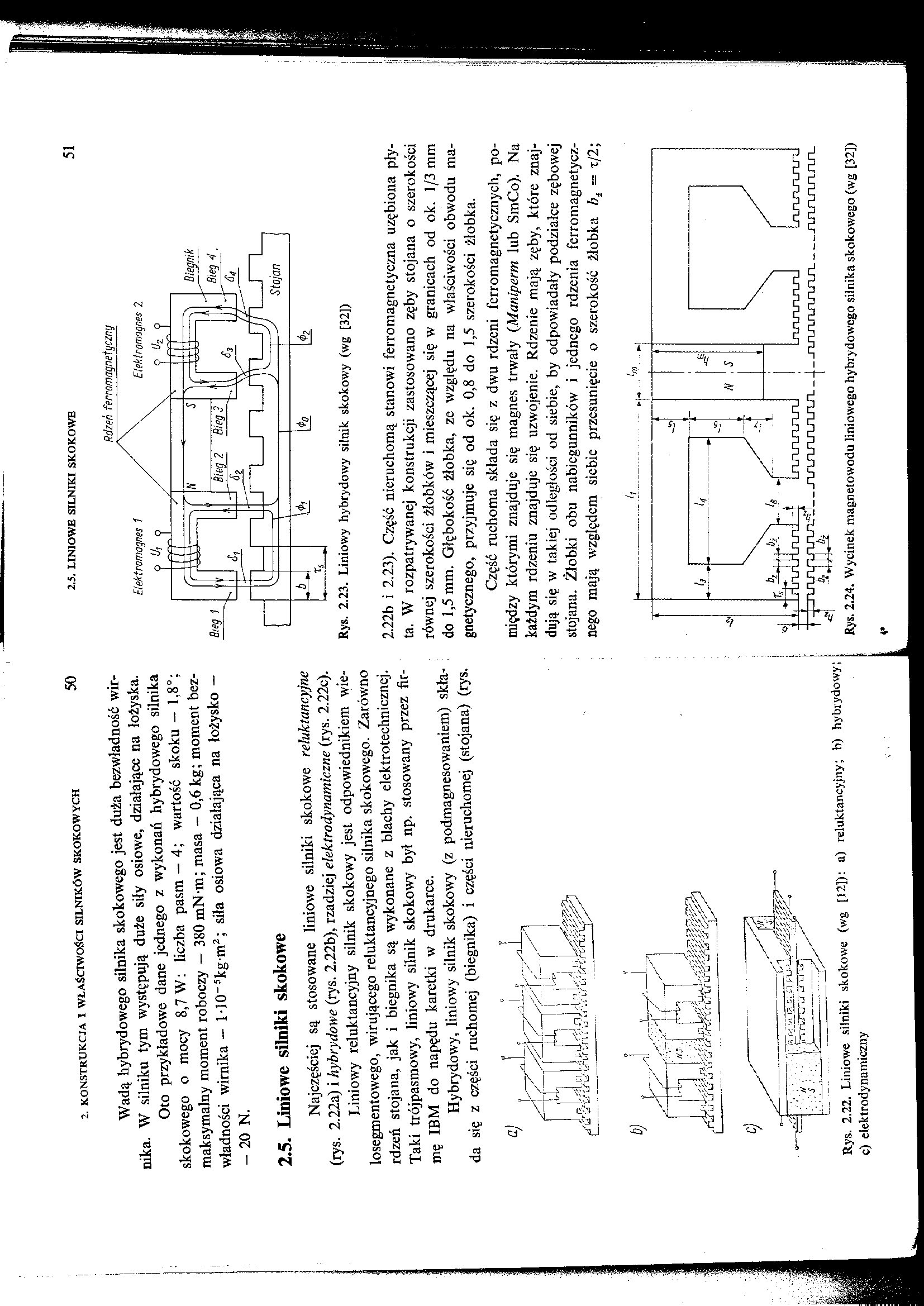
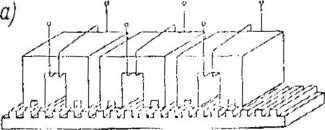
Hybrydowy, liniowy silnik skokowy (z podmagnesowaniem) składa się z części ruchomej (biegnika) i części nieruchomej (stojana) (rys.
___i_
»)
i
i
H.......T'
I
I ,fl \t:i I A I liu;L

Rys. 2.22. Liniowe silniki skokowe (wg a) reluktancyjny; h) hybrydowy;
c) elektrodynamiczny
Rdzeń ferromagnetyczny
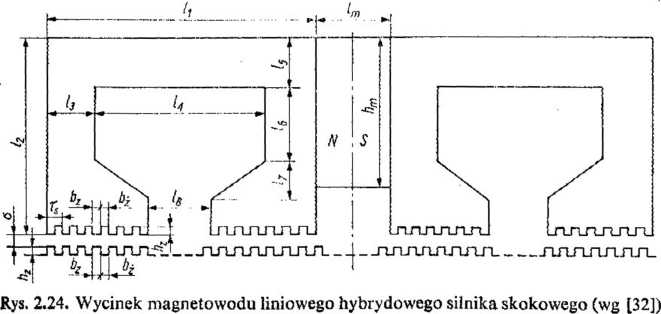
2.22b i 2.23). Część nieruchomą stanowi ferromagnetyczna uzębiona płyta. W rozpatrywanej konstrukcji zastosowano zęby stojana o szerokości równej szerokości żłobków i mieszczącej się w granicach od ok. 1/3 mm do 1,5 mm. Głębokość żłobka, ze względu na właściwości obwodu magnetycznego, przyjmuje się od ok. 0,8 do 1,5 szerokości żłobka.
Część ruchoma składa się z dwu rdzeni ferromagnetycznych, pomiędzy którymi znajduje się magnes trwały (Maniperm lub SmCo). Na każdym rdzeniu znajduje się uzwojenie. Rdzenie mają zęby, które znajdują się w takiej odległości od siebie, by odpowiadały podziałce zębowej stojana. Żłobki obu nabicgunników i jednego rdzenia ferromagnetycznego mają względem siebie przesunięcie o szerokość żłobka bż = x/2;
**
Wyszukiwarka
Podobne podstrony:
instalacje071 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 26 Zasada działania silnika skokowego
instalacje072 2. KONSTRUKCJA l WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 28 Rys. 2.5. Rozkład momentu statyczne
instalacje074 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 32 janie kilkupasmowe uzwojenie steruj
instalacje079 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 42 mieszką metali ziem rzadkich ma tec
instalacje089 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 60 Mogą być stosowane trzy rodzaje uk
instalacje090 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 62 Praca półskokowa w silnikach pięcio
instalacje091 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 64 że jedno z nich musi być łewoskrętn
instalacje073 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 30 W przypadku struktury pokazanej na
instalacje078 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 40 Ponieważ nHc ferrytów jest bardzo d
instalacje082 2. KONSTRUKCJA I WŁAŚCIWOŚCI SILNIKÓW SKOKOWYCH 48 Silnik hybrydowy o magnesach trwały
więcej podobnych podstron