46227 skanuj0037 (61)

Mechanizm „Z”, BPPO
Mechanizm „Z”, BPPO
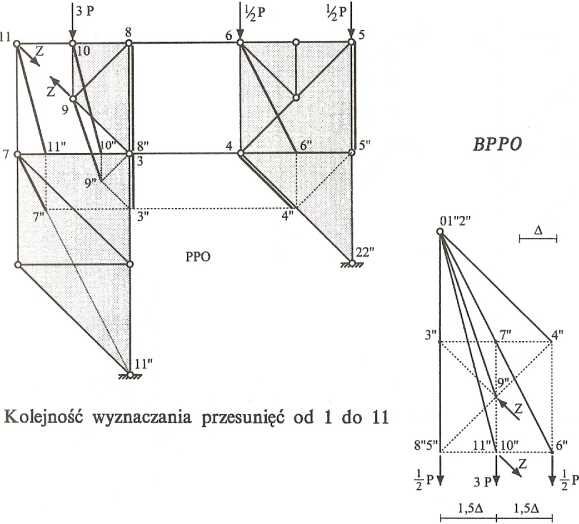
Równanie prac (BPPO)
L = O -> M0 = O,
- Zx • 1,5 A + 3P • 1,5J +^P • 3 J = O, Zx=+4kN Z = +4y/l kN.
Ol
|
—p 2 r |
—P 2 r |
—P 2 r |
~P 2 r |
J | ||
|
t2 / |
F |
ts H | ||||
|
S \ |
D“ (\ |
EF" |
t6 G( |
r | ||
|
\\ S |
E" |
W (27)* | ||||
|
PPO |
BB" | |||||
|
Q\ C' |
\ |
(20) |
W(70) | |||
|
środek obrotu | ||||||
|
\ \ |
lj2 |
2|7 |
2*0 | |||
|
(10)1 |
AA" | |||||

CDI
Kolejność wyznaczania przesunięć węzłów alfabetyczna. Równanie prac (BPPO)
L = 0 -> M0 = 0,
-SSJ-Hgf+^Py 3/1 =0, S=+2P,
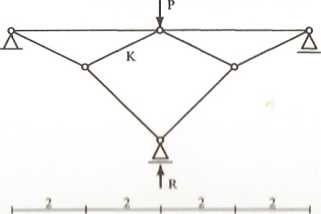
Przykład 28. Metodą kinematyczną wyznaczyć reakcję R oraz siłę w prę cie K kratownicy.
Schemat statyczny
Wyszukiwarka
Podobne podstrony:
skanuj0004 (285) 28.1.1.61^Mechanizm działania i podział antybiotyków Z istniejących licznych podzia
66600 skanuj0004 (285) 28.1.1.61^Mechanizm działania i podział antybiotyków Z istniejących licznych
skanuj0020 (228) Mechanizm działania toksycznego. Reaktywne metabolity chlorki; winyiu * cję pod wpł
skanuj0027 (107) Mechanizm „R 2-4 2-9:2 jo 2-9:2 —(2-9:2) 5q>2+Ry 6<p3+40-ę
skanuj0410 16.3. Mechanizmy do otrzymywania ruchu przerywanego Mechanizmy o ruchu przerywanym spełni
skanuj0031 (75) Mechanizm „My” środek obrotu 23O tl nieruchomaiż—i (12) t2 -g&p- t3 (30)
więcej podobnych podstron