2tom035
2. URZĄDZENIA SPAWALNICZE 72
2. URZĄDZENIA SPAWALNICZE 72

Rys. 2.46. Schemat blokowy zgrzewarki punktowej (objaśnienia symboli w tekście)
ustalony w chwili włączenia, a tym samym ogranicza rozrzut czasów przepływu prądu zgrzewania.
Ze względu na liczbę programów zgrzewania rozróżnia się urządzenia sterujące:
— jednoprogramowe,
— dwuprogramowc,
— wicloprogramowe [2.10, 2.11, 2.31].
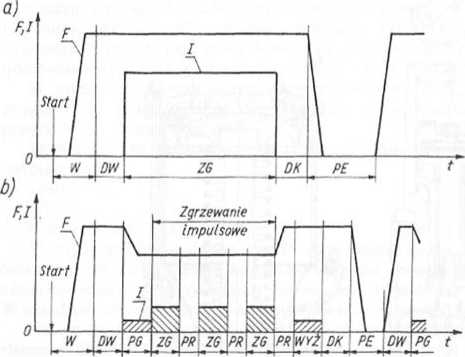
Rys. 2.47. Podstawowe programy pracy zgrzewarek punktowej lub garbowej: a) prosty; b) złożony F siła docisku elektrod: 1 prąd zgrzewania; czasy: W wstępny, DW docisku wstępnego. PG podgrzewania, ZG — zgrzewania, FR przerwy, HO# — wyżarzania, DK docisku końcowego. PE rozwarcia elektrod Zaczerpnięto z [2.28]
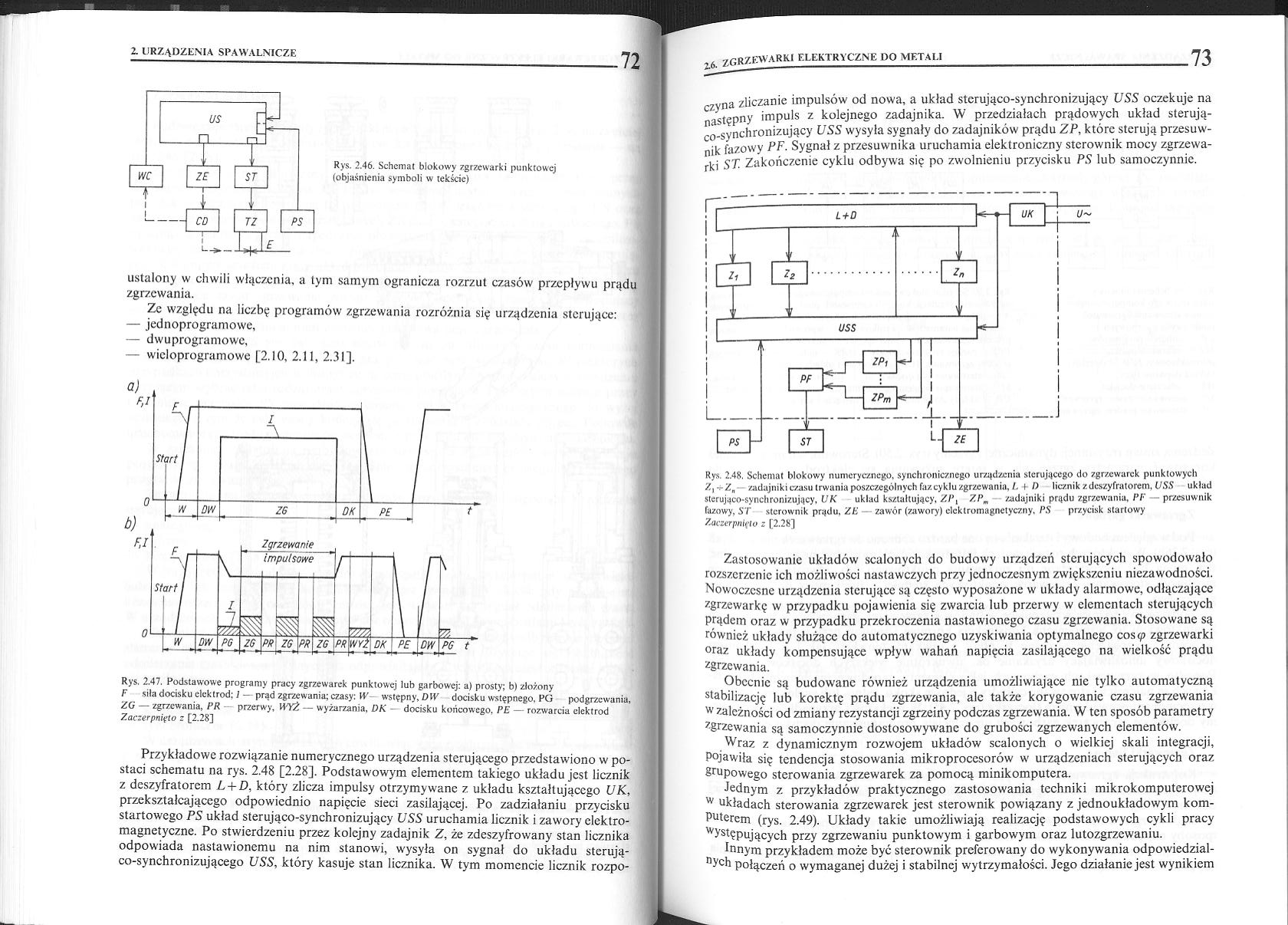
Przykładowe rozwiązanie numerycznego urządzenia sterującego przedstawiono w postaci schematu na rys. 2.48 [2.28]. Podstawowym elementem takiego układu jest licznik z deszyfratorem L + D, który zlicza impulsy otrzymywane z układu kształtującego UK, przekształcającego odpowiednio napięcie sieci zasilającej. Po zadziałaniu przycisku startowego PS układ sterująco-synchronizujący USS uruchamia licznik i zawory elektromagnetyczne. Po stwierdzeniu przez kolejny zadajnik Z, że zdeszyfrowany stan licznika odpowiada nastawionemu na nim stanowi, wysyła on sygnał do układu sterują-co-synchronizującego USS, który kasuje stan licznika. W tym momencie licznik rozpoczyna zliczanie impulsów od nowa, a układ stcrująco-synchronizujący USS oczekuje na następny impuls z kolejnego zadajnika. W przedziałach prądowych układ sterują-co-synchronizujący USS wysyła sygnały do zadajników prądu ZP, które sterują przesuw-nik fazowy PF. Sygnał z przesuwnika uruchamia elektroniczny sterownik mocy zgrzewarki ST. Zakończenie cyklu odbywa się po zwolnieniu przycisku PS lub samoczynnie.

Rys. 2.48. Schemat blokowy numerycznego, synchronicznego urządzenia sterującego do zgrzewarek punktowych /, Zn zadajniki czasu trwania poszczególnych fazcyklu zgrzewania, /. ■ D licznik zdeszyfratorem, USS układ sterująco-synchronizujący, UK układ kształtujący, Z!\ ZP„ zadajniki prądu zgrzewania, PI' — przesuwnik fazowy, ST sterownik prądu, ZE — zawór (zawory) elektromagnetyczny. PS przycisk startowy Zaczerpnięto z [2.28]
Zastosowanie układów scalonych do budowy urządzeń sterujących spowodowało rozszerzenie ich możliwości nastawczych przy jednoczesnym zwiększeniu niezawodności. Nowoczesne urządzenia sterujące są często wyposażone w układy alarmowe, odłączające zgrzewarkę w przypadku pojawienia się zwarcia lub przerwy w elementach sterujących prądem oraz w przypadku przekroczenia nastawionego czasu zgrzewania. Stosowane są również układy służące do automatycznego uzyskiwania optymalnego cos <p zgrzewarki oraz układy kompensujące wpływ wahań napięcia zasilającego na wielkość prądu zgrzewania.
Obecnie są budowane również urządzenia umożliwiające nic tylko automatyczną stabilizację lub korektę prądu zgrzewania, ale także korygowanie czasu zgrzewania w zależności od zmiany rezystancji zgrzeiny podczas zgrzewania. W ten sposób parametry zgrzewania są samoczynnie dostosowywane do grubości zgrzewanych elementów.
Wraz z dynamicznym rozwojem układów scalonych o wielkiej skali integracji, pojawiła się tendencja stosowania mikroprocesorów w urządzeniach sterujących oraz grupowego sterowania zgrzewarek za pomocą minikomputera.
Jednym z przykładów praktycznego zastosowania techniki mikrokomputerowej w układach sterowania zgrzewarek jest sterownik powiązany z jednoukładowym komputerem (rys. 2.49). Układy takie umożliwiają realizację podstawowych cykli pracy występujących przy zgrzewaniu punktowym i garbowym oraz lutozgrzcwaniu.
Innym przykładem może być sterownik preferowany do wykonywania odpowiedzialnych połączeń o wymaganej dużej i stabilnej wytrzymałości. Jego działanie jest wynikiem
Wyszukiwarka
Podobne podstrony:
2tom036 2. URZĄDZENIA SPAWALNICZE -74 Rys. 2.49. Schemat blokowy standardowego komputerowego uk
2tom033 2. URZĄDZENIA SPAWALNICZE 68 Rys. 2.42. Schemat mechanizmu spęcrającego krzywkowego z napęde
2tom027 2. URZĄDZENIA SPAWALNICZE 56 Rys. 2.23. Schemat procesu spawania elektrodą nietopliwą: a) be
TMP76 Rys. 3.14. Schemat blokowy układu urządzeń energetycznych w elektrowni kondensacyjnej, wg [11]
Obraz0037 72 Rys. 5.19. Schemat r.ptf żurkowej pompy ciepła i wykres realizowanego w niej obiegu w u
Rys. 11. Schemat blokowy nadajnika radiofonicznego Oprócz wymienionych wyżej urządzeń służących do
Photo0038 6. Sprężarki urządzeń chłodniczych 183 Rys. 6.27. Schemat mechanizmu unoszenia płytek pier
Photo0048 6. Sprężarki urządzeń chłodniczych 193 Rys. 6.36. Schemat instalacji napełniania sprężarek
Photo0080 6. Sprężarki urządzeń chłodniczych 225 Rys. 6.51. Schemat ilustrujący zasadę regulacji wyd
OMiUP t2 Gorski(6 Rys. 7.27. Schemat blokowy urządzenia sterowego o układzie zamkniętym (ze sprzężen
Rys. 46. Schemat urządzenia telefonicznego z przestrajaniem fal.ęou o co
Image263 Rys. 4.290. Schemat blokowy licznika nastawnego z nastawieniem pojemności za pomocą przełąc
Image276 Rys. 4.310. Schemat blokowy synchronicznego czterodekadowego licznika programowanego Rozpat
więcej podobnych podstron