51351 skrypt#
Ortogonalne filtry prognozujące o strukturze kaskadowe i Komentarz
RYS. 3 20
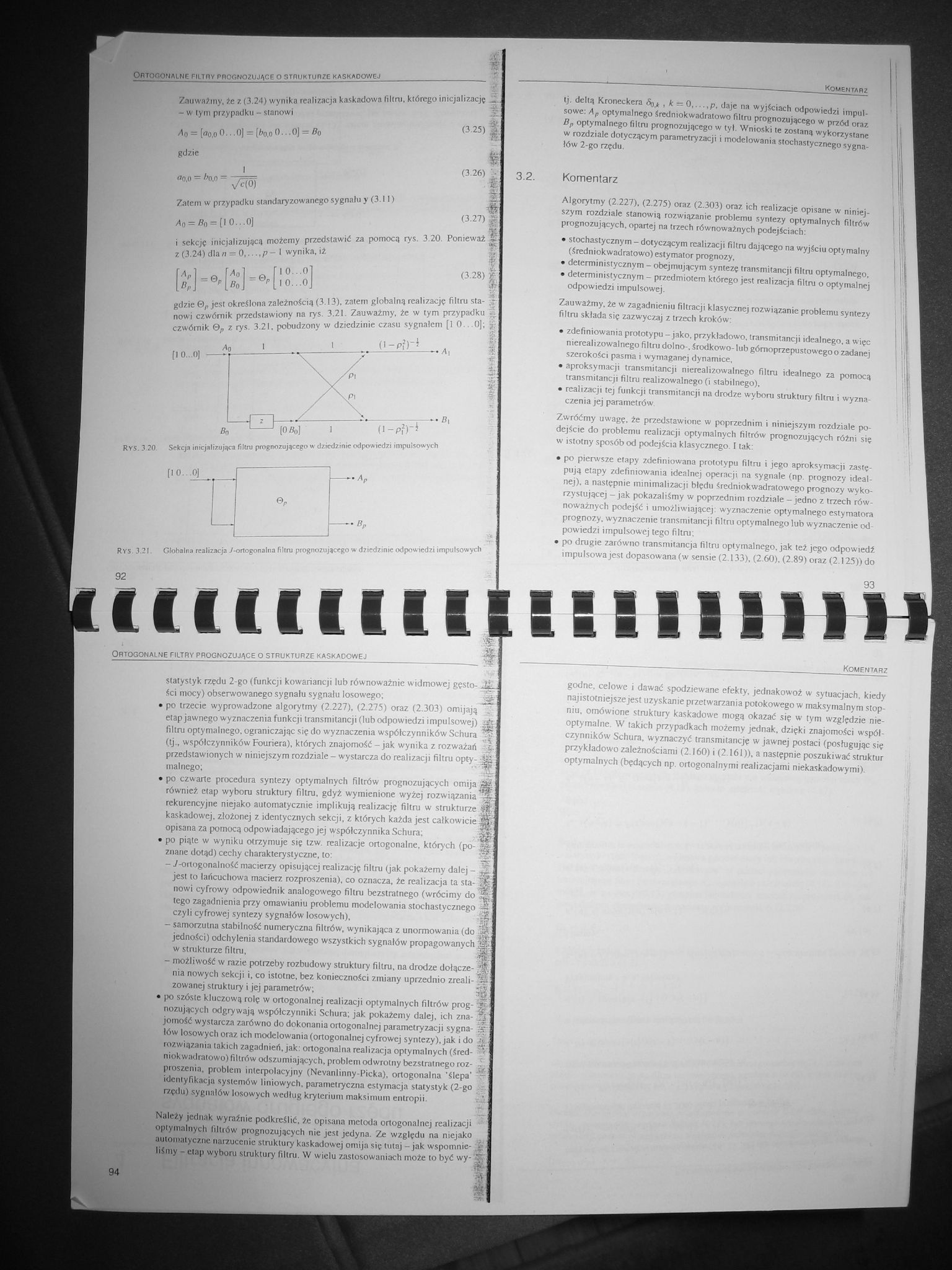
Zauważmy, że i. (3.24) wynika realizacja kaskadowa fillni, którego inicjalizację _ - W tym przypadku - Sianowi
/to = [a0.o 0.. .0] = Ko 0...0] = B0 (3 25)
gdzie
aon=,,nn=7m
Żalem w przypadku standaryzowanego sygnału y (3.11)
/to = 8o = (10...0)
sekcję inicjalizująca możemy przedstawić za pomocq rvs 3 20 Ponieważ. *
.....tf S
^— __a
(3.26)
(3.27) -ą
z (3.24) dla ii = 0.....p— I wynika, iż
f/tpl _0 M°
D ~ P «"
L"/>J i--j
gdzie 0,, jesl określona zależnością (3.13), żalem globalną realizację filiru sta- | nowi czwómik przedstawiony na rys 3.21 Zauważmy, że w tym przypadku czwómik 0„ z rys 3.21. pobudzony w dziedzinie czasu sygnałem (I 0 OJ; ,
czwómik 0
[I 0.. 01
/'o
Bo -- (0Bo) I d-p,1H
Sekcja inicjalizująca filtru prognozującego w dziedzinie odpowiedzi impulsowych
(10. 0)
rys. 3.21 Globalna realizacja
facja /-ortogonalna film, pmgnozującego w dziedzinie odpowiedzi impulsowych
Ij. dclią Kroncckera 5o> , k — 0,...,p. daje na wyjściach odpowiedzi impulsowe; Ap optymalnego średniokwadratowo filtru prognozującego w przód oraz Br optymalnego fillni prognozującego w tyl. Wnioski te zostaną wykorzystane w rozdziale dolyczącym parametryzacji i modelowania stochastycznego sygna lów 2-go rzędu.
3.2. Komentarz
Algorytmy (2 227). (2.275) oraz (2.303) oraz ich realizacje opisane w niniejszym rozdziale stanowią rozwiązanie problemu syntezy optymalnych filtrów prognozujących, opartej na trzech równoważnych podejściach:
• stochastycznym - dotyczącym realizacji filtru dającego na wyjściu optymalny (średniokwadratowo) estymator prognozy,
• deterministycznym - obejmującym syntezę transmitancji filtru optymalnego,
• deterministycznym - przedmiotem którego jest realizacja filtru o optymalnej odpowiedzi impulsowej.
Zauważmy, że w zagadnieniu filtracji klasycznej rozwiązanie problemu syntezy filtru składa się zazwyczaj z trzech kroków:
• zdefiniowania prototypu - jako. przykładowo, transmitancji idealnego, a więc niercalizowalnego filtru dolno-, środkowo- lub gómoprzepustowcgo o zadanej szerokości pasma i wymaganej dynamice,
• aproksymacji transmitancji nierealizowalncgo filtru idealnego za pomocą transmitancji filtru realizowalnego (i stabilnego).
• realizacji tej funkcji transmitancji na drodze wyboru struktury filtru i wyznaczenia jej parametrów
Zwróćmy uwagę, że przedstawione w poprzednim i niniejszym rozdziale podejście do problemu realizacji optymalnych filtrów prognozujących różni się w istotny sposób od podejścia klasycznego I tak:
• po pierwsze etapy zdefiniowana prototypu filtru i jego aproksymacji zastępują etapy zdefiniowania idealnej operacji na sygnale (np prognozy idealnej), a następnie minimalizacji błędu średniokwadratowego prognozy wykorzystującej - jak pokazaliśmy w poprzednim rozdziale - jedno z trzech równoważnych podejść i umożliwiającej wyznaczenie optymalnego estymatora prognozy, wyznaczenie transmitancji filtru optymalnego lub wyznaczenie od powiedzi impulsowej tego filtru;
• po drugie zarówno transmitancja filtru optymalnego, jak też. jego odpowiedź impulsowa jest dopasowana (w sensie (2.133). (2 60). (2.89) oraz (2.125)) do
93
Komentarz
godne, celowe i dawać spodziewane efekty, jednakowoż w sytuacjach, kiedy najistotniejsze jest uzyskanie przetwarzania potokowego w maksymalnym stopniu, omówione struktury kaskadowe mogą okazać się w tym względzie nieoptymalne W takich przypadkach możemy jednak, dzięki znajomości współczynników Schura. wyznaczyć transnutancję w jawnej postaci (posługując się przykładowo zależnościami (2.160) i (2.161)), a następnie poszukiwać stniktur optymalnych (będących np ortogonalnymi realizacjami niekaskadowymi).
94
• po czwarte procedura syntezy optymalnych filtrów prognozujących omija
również, etap wyboru struktury filtru, gdyż wymienione wyżej rozwiązania 2|-rckurencyjne niejako automatycznie implikują realizację fillni w stntktnrze jjjj; kaskadowej, złożonej z identycznych sekcji, z których każda jest całkowicie opisana za pomocą odpowiadającego jej współczynnika Schura; Sg
• po piąte w wyniku otrzymuje się tzw realizacje ortogonalne, których (po
znane dotąd) cechy charakterystyczne, to: i
- 7-ortogonalność macierzy opisującej realizację filtru (jak pokażemy dalej -
jest to łańcuchowa macierz rozproszenia), co oznacza, Zc realizacja ta sta- |* nowi cyfrowy odpowiednik analogowego filtni bezstratnego (wrócimy do tego zagadnienia przy omawianiu problemu modelowania stochastycznego Z) czyli cyfrowej syntezy sygnałów losowych), jfz
- samorzutna stabilność numeryczna filtrów, wynikająca z unormowania (do
jedności) odchylenia standardowego wszystkich sygnałów propagowanych H; w strukturze filtru, «;
- możliwość w razie potrzeby rozbudowy struktury filtru, na drodze dołączę-
nia nowych sekcji i, co istotne, bez konieczności zmiany uprzednio zrcali ‘~~ zowanej struktury i jej parametrów; Vjś
• |>o szóste kluczową rolę w ortogonalnej realizacji optymalnych filtrów próg-2 nozującycli odgrywają współczynniki Schura, jak pokażemy dalej, ich zna- % jomość wystarcza zarówno do dokonania ortogonalnej parametryzacji sygna ■£ lów losowych oraz ich modelowania (ortogonalnej cyfrowej syntezy), jak ido żt rozwiązania takich zagadnień, jak: ortogonalna realizacja optymalnych (średniokwadratowo) filtrów odszumiających, problem odwrotny bezstratnego rozproszenia, problem interpolacyjny (Nevanlinny-Picka), ortogonalna 'ślepa' identyfikacja systemów liniowych, parametryczna estymacja statystyk (2 go rzędu) sygnałów losowych według kryterium maksimum entropii
Należy jednak wyraźnie podkreślić, że opisana metoda ortogonalnej realizacji optymalnych filtrów prognozujących nie jest jedyna. Ze względu na niejako automatyczne narzucenie struktury kaskadowej omija się tutaj - jak wspomnic- -liśniy etap wyboru struktury filtni. W wielu zastosowaniach może to być wy-
po trzecie wyprowadzone algorytmy (2.227), (2.275) oraz (2.303) omijają , etap jawnego wyznaczenia funkcji transmitancji (lub odpowiedzi impulsowej) gt i filtru optymalnego, ograniczając się do wyznaczenia współczynników Schura |3 2 (tj., współczynników Fouriera), których znajomość - jak wynika z rozważań Ł. przedstawionych w niniejszym rozdziale - wystarcza do realizacji filtru opty tnalncgo;
statystyk rzędu 2-go (funkcji kowariancji lub równoważnie widmowej gęsto- JLj ści mocy) obserwowanego sygnału sygnału losowego; jjj
Wyszukiwarka
Podobne podstrony:
19949 skrypt Ortogon alne rti ihv proc, nozujące o strukturze kask a rxw i y(0 ©A Globaln
liwości wprowadzenia zmian najbardziej popularnej struktury kaskadowej pozycja-prędkość-prąd,
33662 skrypt LIN>QWA PROGNOZA ŚnEPNIOKWAPRATOWA SYGNAIÓW STACJONAHNYCH Stąd wniosek, źe l.ju irm
23891 skrypt021 (2) 21 c) transformatora probierczego lub kaskady transformatorów
Modele ruchu Modele ruchu obejmują prognozę mchu, w tym także prognozę struktury rodzajowej oraz kos
Przykład m-pliku skryptowego % po znaku procentu są tzw. komentarze % program rozwiązywania równania
Image017 W przekroju poprzecznym struktury układu scalonego (rys. 1.13) można wyróżnić cztery warstw
więcej podobnych podstron