23 (281)
4.2.3. Aktualna wartość pozycji silnika w funkcji czasu
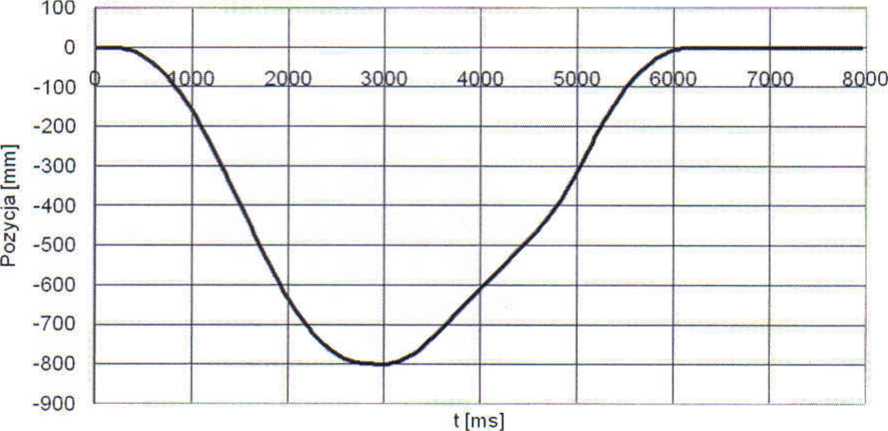
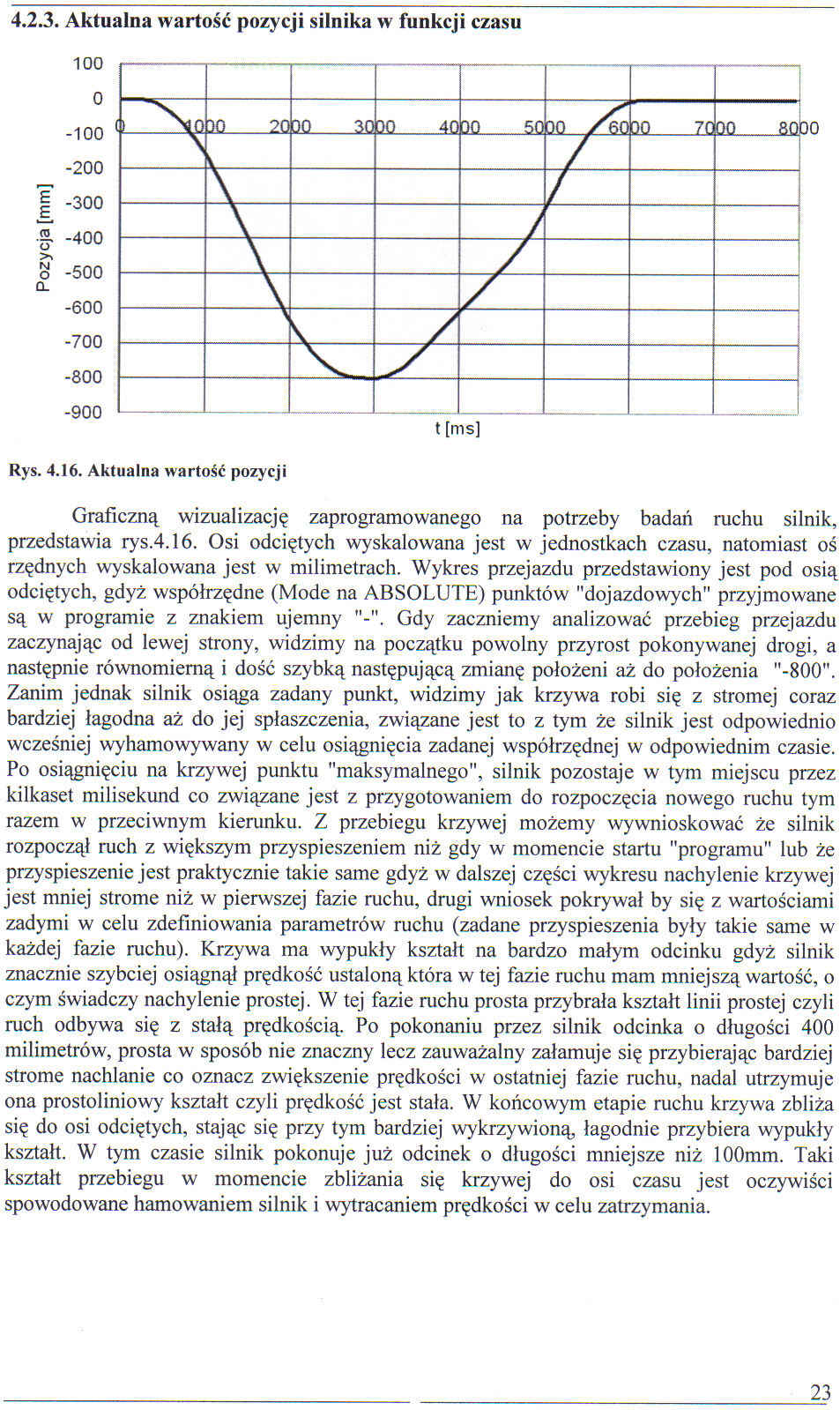
Rys. 4.16. Aktualna wartość pozycji
Graficzną wizualizację zaprogramowanego na potrzeby badań ruchu silnik, przedstawia rys.4.16. Osi odciętych wyskalowana jest w jednostkach czasu, natomiast oś rzędnych wyskalowana jest w milimetrach. Wykres przejazdu przedstawiony jest pod osią odciętych, gdyż współrzędne (Modę na ABSOLUTE) punktów "dojazdowych" przyjmowane są w programie z znakiem ujemny Gdy zaczniemy analizować przebieg przejazdu zaczynając od lewej strony, widzimy na początku powolny przyrost pokonywanej drogi, a następnie równomierną i dość szybką następującą zmianę położeni aż do położenia "-800". Zanim jednak silnik osiąga zadany punkt, widzimy jak krzywa robi się z stromej coraz bardziej łagodna aż do jej spłaszczenia, związane jest to z tym że silnik jest odpowiednio wcześniej wyhamowywany w celu osiągnięcia zadanej współrzędnej w odpowiednim czasie. Po osiągnięciu na krzywej punktu "maksymalnego", silnik pozostaje w tym miejscu przez kilkaset milisekund co związane jest z przygotowaniem do rozpoczęcia nowego ruchu tym razem w przeciwnym kierunku. Z przebiegu krzywej możemy wywnioskować że silnik rozpoczął ruch z większym przyspieszeniem niż gdy w momencie startu "programu" lub że przyspieszenie jest praktycznie takie same gdyż w dalszej części wykresu nachylenie krzywej jest mniej strome niż w pierwszej fazie ruchu, drugi wniosek pokrywał by się z wartościami zadymi w celu zdefiniowania parametrów ruchu (zadane przyspieszenia były takie same w każdej fazie ruchu). Krzywa ma wypukły kształt na bardzo małym odcinku gdyż silnik znacznie szybciej osiągnął prędkość ustaloną która w tej fazie ruchu mam mniejszą wartość, o czym świadczy nachylenie prostej. W tej fazie ruchu prosta przybrała kształt linii prostej czyli ruch odbywa się z stałą prędkością. Po pokonaniu przez silnik odcinka o długości 400 milimetrów, prosta w sposób nie znaczny lecz zauważalny załamuje się przybierając bardziej strome nachlanie co oznacz zwiększenie prędkości w ostatniej fazie ruchu, nadal utrzymuje ona prostoliniowy' kształt czyli prędkość jest stała. W końcowym etapie ruchu krzywa zbliża się do osi odciętych, stając się przy tym bardziej wykrzywioną, łagodnie przybiera wypukły kształt. W tym czasie silnik pokonuje już odcinek o długości mniejsze niż lOOmm. Taki kształt przebiegu w momencie zbliżania się krzywej do osi czasu jest oczywiści spowodowane hamowaniem silnik i wytracaniem prędkości w celu zatrzymania.
23
Wyszukiwarka
Podobne podstrony:
33 (67) 4.2.8. Przebieg prądu pobieranego przez silnik w funkcji czasu. t[ms] b) Rys. 4.21 Wartość p
HWScan00211 = 1500 obr/min. Z wykresu mocy tego silnika w funkcji obrotów (rys. 5.54) dobieramy moc
instalacje159 7. ZASTOSOWANIA SILNIKÓW SKOKOWYCH 198 Rys. 7.16. Schemat pracy skanera termalnego z e
scn0002 I. Strata ze zbycia niefinansowych aktywów trwałych 23 II. Aktualizacja wartości aktywów
32 (164) 4.2.7 Wartość bezw zględna napięcia w funkcji czasu.a) t[ms] b) Rys. 4.20. Przebiegi napięć
R oznacza tu wartość stałą, niezależną od czasu, Rt funkcję czasu, iloraz UtjJt ma przytem wymiar&nb
100D63 Regulator I dostarcza dawkę energii w funkcji czasu, 1 bez względu na temperaturę aktualną. R
Delta diraca 3/ , a jedynie I Delta Diracka 3/ jest ciągłą funkcją czasu, której wszystkiej wartości
delta diraca jest ciągłą Delta Diracka ▼ jest ciągłą funkcją czasu, której wszystkiej wartości równe
lastscan31 F 4000 Rysunek 3.1. Wartość kapitału juko funkcja czasu przy kapitalizacji rocznej krzywy
Tabela 3.1. Wartości modułu Younga (£) i wytrzymałości na zginanie (ow) trzech tworzyw w funkcji cza
Sterowanie silnikiem krokowym Przepływ prądu przez cewkę uzwojenia w funkcji czasu
więcej podobnych podstron