286 (8)
O eon a dokładności
1) Błąd położenia punktu
- macierz kowariancji wyrównanych współrzędnych
Ć* =/i^(A7PA)“'
|
f 50.58 |
- 37.94" |
r -> _| |
ćov(Xz.Yz) |
|
j -37.94 i. |
50.59 |
(mm) | cm’(f |
O Yy. J |
- błędy średnie wyrównanych współrzędnych i błąd położenia punktu Z
|
ni - — 750.58 —7.1 (mm) 1 A / | ||
|
i 1 2 | ||
|
»iy — J50.59 — 7.1 (min) I |
mptĄZ) ~yjmx./ +/Uyy |
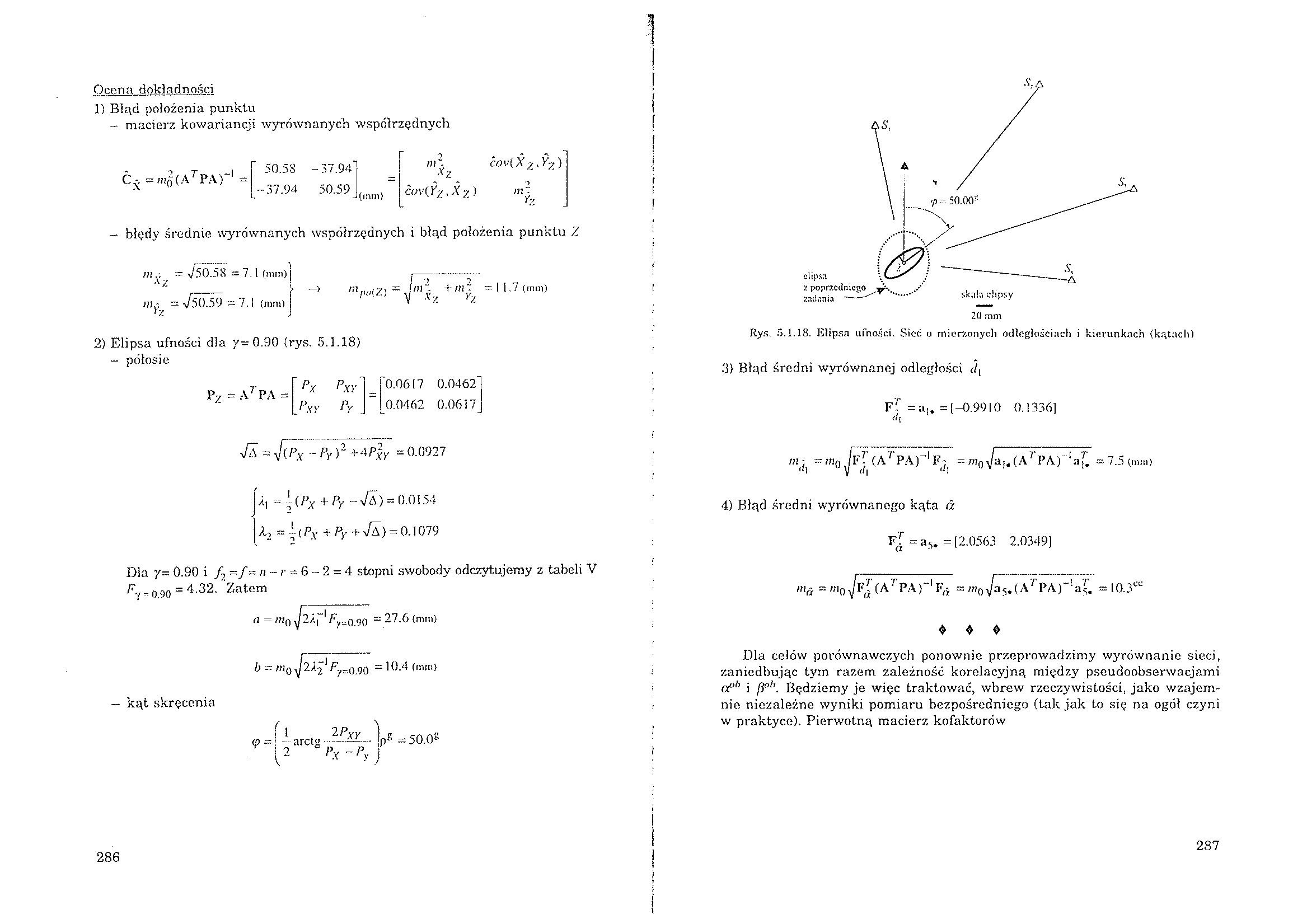
2) Elipsa ufności dla y=0.90 (rys. 5.1.18) - półosie
Px
PX Y
0.04621
0.0617 J
Pz = A7 PA =
!’x — Py)“ +4Pxy - 0.0927
2, =i(Px +Py ~yfi\) ~ 0.0154 l2 ~ ' ( Px -t- Py + yfA ) = 0. 1 079
Dla y- 0.90 i Ą =/= ;j ~ r = 6 - 2 = 4 stopni swobody odczytujemy z tabeli V /fy _ 0 90 = 4.32. Zatem
a = m{) b = m0
^y-0.90
— 27.6 (mm)
f'y-.0.9Q
-10.4 (mm)
— kąt skręcenia
X
- 50.08
1 2PXy
.....aretg.....——■
2 hPx-Py
z poprzedniego w-. ./ , , ..
, ___*......‘ sk;i a c ipsy
Zndnnia 1 ’
20 mm
Rys. 5.1.18. Elipsa ufności. Sieć u mierzonych odległościach i kierunkach (kątach)
3) Błąd średni wyrównanej odległości </,
F-f = a,. =(-0.9910 0.1336] <h
~ m0
4) Błąd średni wyrównanego kąta a
-.7
JfJ (AtPAr‘ F?J - mQ \/aj7(A7 P A) 1 a f. = 7.5 (min)
Fi = a5. =12.0563 2.0349]
* = /ao^CA^PA)"1^ = m0^^(ArPAyl-.ii = 10.3"
Dla celów porównawczych ponownie przeprowadzimy wyrównanie sieci, zaniedbując tym razem zależność korelacyjną miedzy pseudoobserwacjami tt"7* i Będziemy je więc traktować, wbrew rzeczywistości, jako wzajemnie niezależne wyniki pomiaru bezpośredniego (tak jak to się na ogół czyni w praktyce). Pierwotną macierz kofaktorów
287
Wyszukiwarka
Podobne podstrony:
438 (5) Kontynuując obliczenia, wyznaczamy: Macierz kowariancji wyrównanych współrzędnych, biedy śre
290 (8) błędy średnie wyrównanych współrzędnych i błąd położenia punktu Z pierwotnie ul o = 7.3
img118 118 także wektory własne macierzy kowariancji Cxx. Istotnie, spróbujmy szukać punktu stałego
img203 205 Średni błąd wyznaczenia położenia punktu triangulacyjnego w sieci wypełniającej l zagęszc
Graficznym obrazem macierzy błędu położenia punktu w układzie horyzontalnym C = Cx (jak również
41936 img203 (6) 205 średni błąd wyznaczenia położenia punktu triangulacyjnego v sieci wypełniającej
kwas4 Dokładne położenie punktu równoważnikowego wyznaczyć graficznie. Odkładając na osi X ilość dod
Test 2008 1. Dokładność położenia punktu w pomiarach sytuacyjnych wzg. punktów
Sieci CP str118 118 także wektory własne macierzy kowariancji Cxx. Istotnie, spróbujmy szukać punktu
177 Badania wszechświata. Stanowczą podstawę do dokładnych obliczań położenia księżyca na niebie
img103 (6) Ostrzem szpilki oznaczamy położenie punktu 4. Należy zwrócić uwagę na pewien szczegół. Ot
img105 (6) Ostrzem szpilki oznaczamy położenie punktu 4. Należy zwrócić uwagę na pewien szczegół. Ot
więcej podobnych podstron