298 (9)
na podstawę wyrównanych współrzędnych
|
(ll ~ |
yl(X2}-X |3); + (>31 |
~7jł)” — 1674.85 (m) v |
|
(I2 — \ |
/(*2l - A"20)“ +(>2I |
_y20)2 =1694.10 rm) v |
|
<h =! |
/(X21 ~ A 20)" (>2i |
- “ = 1367,67 (nu v |
v \
H etap kontroli na podstawie poprawek.
rf, = 1674.85 (in)
<i'i ~ i 694.10 (mi (i 2 ~ 1367.67 (m>
a ret a
(
r = i arctc
|
>20 |
- aretg |
>21 - |
|
*20- *13 |
* 21 '' | |
|
>21 ~ *20 |
>13- | |
|
*21 ~ *20 |
*13 — | |
|
>22- >20 |
>\l“ | |
|
A 22 “ A 20 |
aretg |
*21 — |
731 — 7'7 4 2 j ~ A -
42i’57'33' v
o = 56c34'05" v
a * 42*57'33"
fi ~ 5 6° 34'05" P ~
y - 62° 51'33'
-?I........—°-)o = 62"5l'35"
X 'rn )
i - 45\55'29'
r = aretg •
}720
■aretg—™ *20
“ >22 - Ar-
o = 45°S5'29'
Ocena dokładności
1) Błąd położenia punktu 21 po wyrównaniu
- macierz kowariancji wyrównanych współrzędnych
= /»q (ArPA)
O

cm>(y2l, X 2|}
0.00079 0.00020] 0.00020 0.0008 lj(|nlz
C0V(X2l'Y2l)
1

błędy średnie wyrównanych współrzędnych i błąd położenia punktu
s/o.00079 = 0.03 (m) |
>n
* 21
mc = /0.00081 - 0.03 (m) '21
"> 'n}u>(2\) +,r‘y2i
~ 0.04 (m)
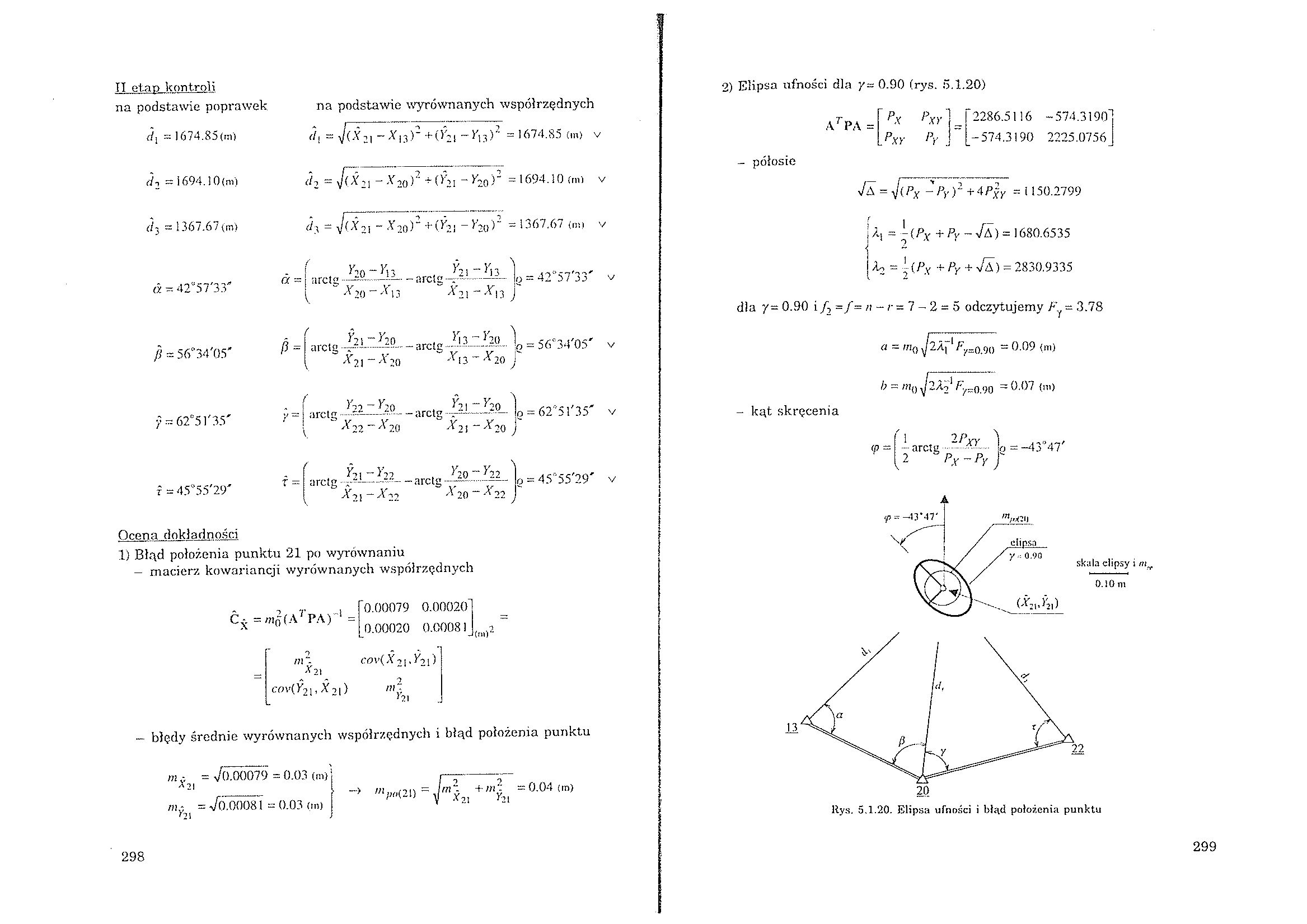
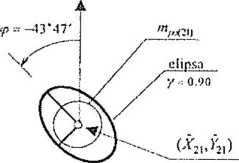
2) EHpsa ufności dla y~ 0.90 (rys. 5.1.20)
A7" PA =
PX pXY ] _ f 2286.5116 -574.3190] _PXy Py J ~ [- 574.3190 2225.0756 J
- pófosie
JA = yj(Px Jpy)1 t4PŹy - 1150.2799
I Aj = - (Pv +Pv~J,A) = 1680.6535 1 2
[ - i{px + PY-f Ta) = 2830.9335
dla 7- 0.90 i/2 =/= /i-/-= 7- 2 = 5 odczytujemy F = 3.78
rt — tn0 J2A| l/'./_Q go — 0.09 <m) /; = 1 7'y-o.90 = 0.07 (m)
- kąt skręcenia


—f3'ł47'
skala elipsy i m 0.10 m
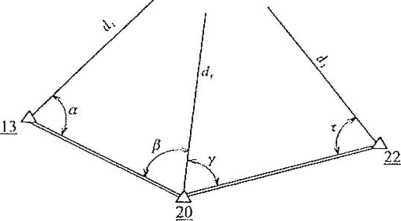
Rys. 5.1.20. Elipsa ufności i błąd położenia punktu
299
Wyszukiwarka
Podobne podstrony:
1.Obliczenie współrzędnych geodezyjnych <1 ,k,h punktów 1 i 2 na podstawie ich współrzędnych XV Z
1. Obliczenie współrzędnych geodezyjnych (p, X, h punktów 1 i 2 na podstawie ich współrzędnych XYZ (
272 (8) I Na podstawie przybliżonych współrzędnych (Xy,Yy) punktu Z oraz znanych współrzędnych poszc
czabak na kubik Inr / 7r*,<Łł - (o^&ył £ Ct(X ~ 2^.
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
DSCF5458 (Kopiowanie) odległość od dna do zwierciadła wody). Na podstawie tv
C (66) Model opracowano w skali 1 : 25 na podstawie materiałów zamieszczonych w zeszycie TBU nr 31.&
Obliczenie współrzędnych horyzontalnych Na podstawie danych pomiarowych na stanowisku tachimetru
30 Milena Napiórkowska na podstawie punktów o znanych współrzędnych geograficznych, przeniesionych n
dd (25) 44Błędy średnie wyrównanych wielkości obserwowanych. Pierwsza metoda polega na : Na podstawi
P1040848 współrzędnych, można wyznaczyć jednoznacznie na podstawie atj. Prawo transformacji składowy
Photo268 lepkość pozorna na podstawie wzoru Klein a: pi =exp(Ao + Aj *lnyl+ Au * ln2 yl + Aj2*T*lny
b) Szkic położenia trójkąta względem bieguna G kuli (na podstawie współrzędnych cp,X) c) rozwiązanie
1.Obliczenie współrzędnych geodezyjnych <p,X,h punktów 1 i 2 na podstawie ich w spólrzędnych
298 11. Wykluczenie społeczne • na podstawie liczby osób korzystających z pomocy
więcej podobnych podstron