332 (7)
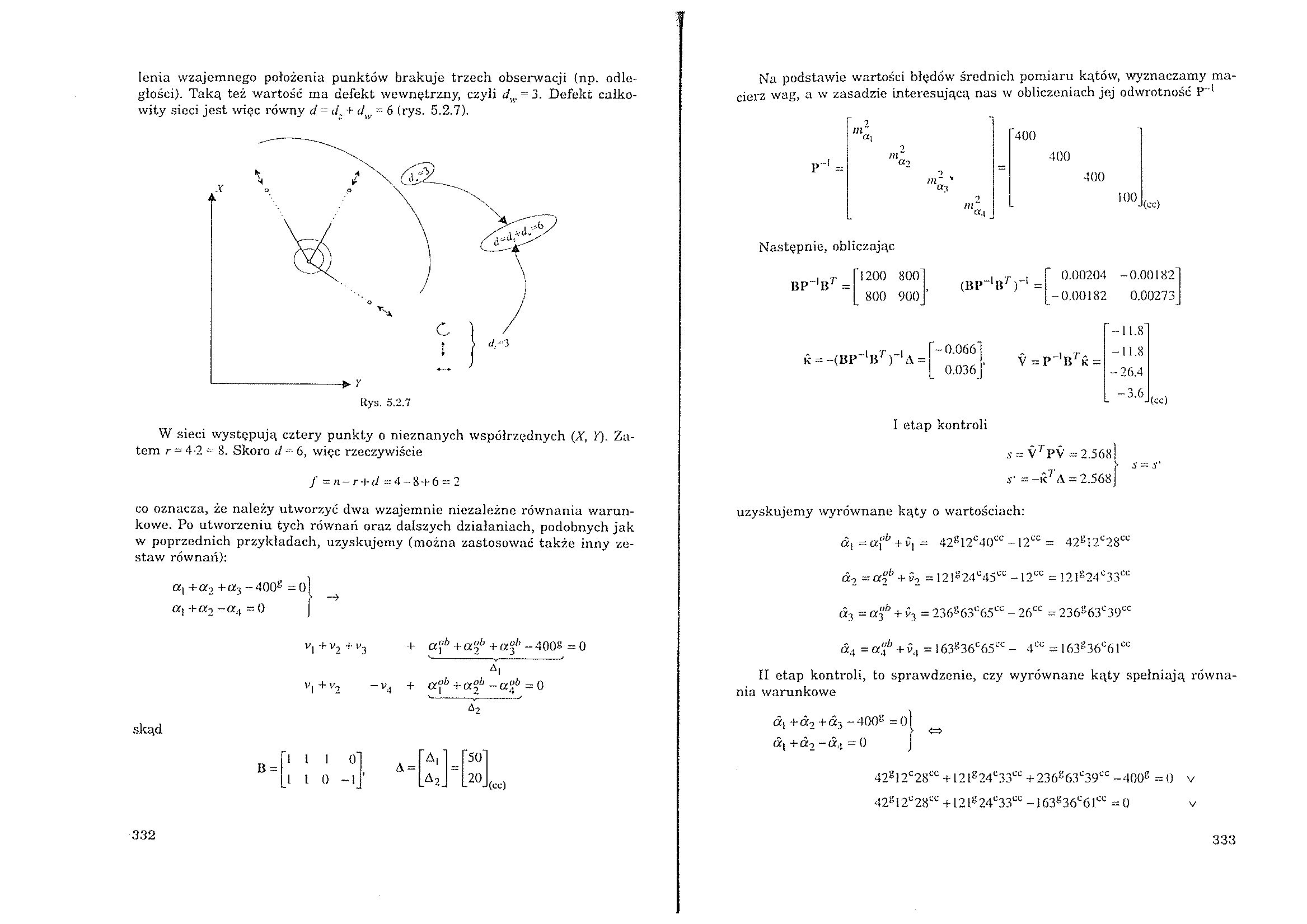
lenia wzajemnego położenia punktów brakuje trzech obserwacji {np. odległości). Taką też wartość ma defekt wewnętrzny, czyli dw = 3. Defekt całkowity sieci jest więc równy d = d. -f- dw = 6 (rys. 5.2.7).
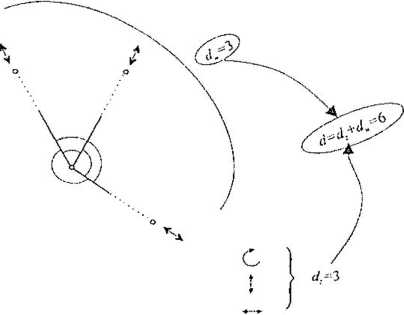
Rys. 5.2.7
> y
W sieci występują cztery punkty o nieznanych współrzędnych (X, Y). Zatem r - 4-2 8. Skoro d ~ 6, więc rzeczywiście
f = /i - r -l- d -■ 4 - 8 + 6 = 2
co oznacza, że należy utworzyć dwa wzajemnie niezależne równania warunkowe. Po utworzeniu tych równań oraz dalszych działaniach, podobnych jak w poprzednich przykładach, uzyskujemy (można zastosować także inny zestaw równań):
a, +a2 +% -400g = 0 OTj -va2 -or4 - 0
v, + v, +
V| +V2 - V4 +
af+af +af -4006 ^0 A\
af + af -af ~ 0 skąd
|
1 l 1 o' |
A — |
A | |
50 | |
|
_l l 0 ~1_ |
i\ — |
Ai. |
20_ |
Na podstawie wartości błędów średnich pomiaru kątów, wyznaczamy macierz wag, a w zasadzie interesującą nas w obliczeniach jej odwrotność P"1
|
1 -) m~ a2 |
400 400 | |
|
a7 -> |
400 100 | |
|
L j |
Następnie, obliczając
-0.00182'
0.00273_
-11.8'
-11.8 -26.4 -3.6 ,
J(Cc)
I etap kontroli
j = V7>V =2.568]
> $ — s'
s' ~-k? A = 2.568j
uzyskujemy wyrównane kąty o wartościach:
di =af + vj - 42g12c40cc - 12cc ~ 42K12C28CC a o - af + v2 ~ 121g24c45cc - 12cc = I2lg24c33cc d3 - af + v3 = 23óg63c65cc - 26cc = 236g63c39cc
aĄ = af + v4 = 163g36c65cc - 4cc = 163g36c61cc
II etap kontroli, to sprawdzenie, czy wyrównane kąty spełniają równania warunkowe
di -ł-ór2 + «3 -400“ = 0 dj +a2 -d4 = 0
BP_IB7 =
1200 800 800 900
(BP“IB7)’
0.066
0.036

0.00204
■0.00182
V =P_,Brk
42g12c28cc + 12I824c33cc + 236g63c39cc ~400g = 0 42g12°28cc + 121g24c33cc ~163s36c61cc -0
v
333
v
Wyszukiwarka
Podobne podstrony:
eoLOEcaum m>cmvsMWPROWADZENIE Ze względu na sposób przedstawienia wzajemnego położenia punktów
Geometria elipsoidy Obliczanie współrzędnych Wzajemne położenie punktów na powierzchni Ziemi, które
DSCN3364 (2) TotalStation jest przeznaczony do wyznaczania położeń punktów (element obiektu terenowe
67027 Untitled Scanned 46 (2) PLANIMETRIA 49 PLANIMETRIA 49 4 m 333. Na rysunku przedstawiono wzajem
slajd2 (56) Wzajemne położenie elementów -przynależność -równoległość
slajd3 (56) Wzajemne położenie elementów •przynależność ■ prosta punkt płaszczyzna płaszczyzna
img173 (7) 167 Elementarne wprowadzenie do techniki sieci neuronowych neuron; jak zwykle położenie p
skanuj0009 (224) Załącznik 3, Szkic sytuacyjny położenia punktów Rysunki poglądowe (szkice): a) rzut
slajd01 (15) WYKŁAD 11 Wzajemne położenie elementów - elementy wspólne (krawędzie
img202 202 202Sys. 215 •co 200 - 30C km. Aby ściśle określić położenie punktów triangulacyjnych na
Warunki wzajemnego położenia osi □ (LL-LW) warunek libelli □
Współrzędne wyrównane określają położenie punktów w terenie - służą do dalszych prac punktów
slajd20 (33) Wzajemne położenie elementów -równoległość dwie płaszczyzny
więcej podobnych podstron