DSC00036 (2)
115
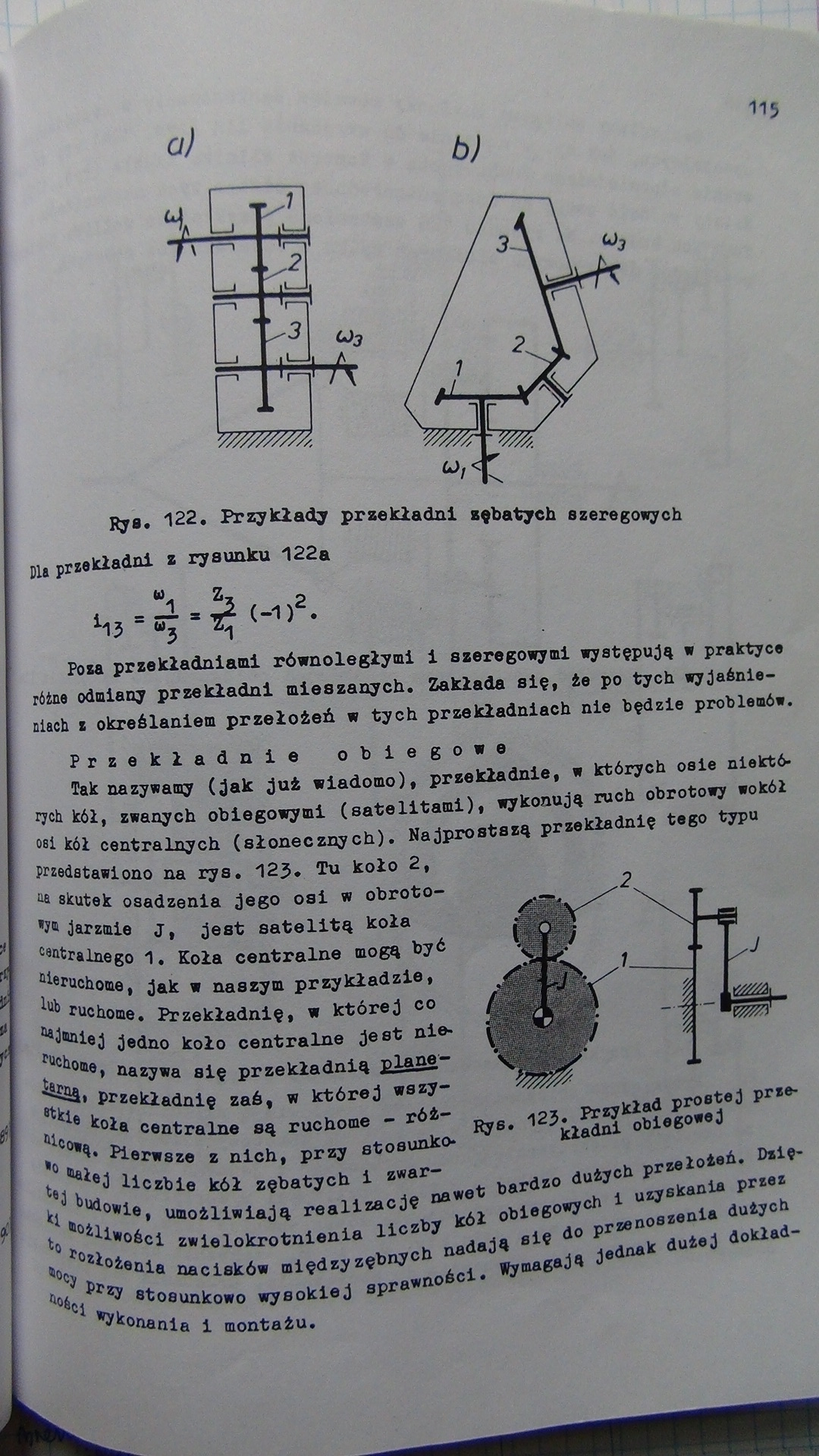
a) b)
115
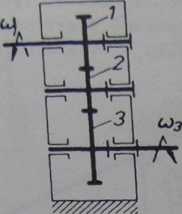
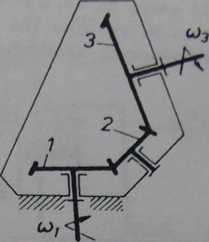
Rys, 122. Przykłady przekładni zębatych szeregowych Dla przekładni z rysunku 122a
“i z* 2
*13 = ^ •
Poza przekładniami równoległymi 1 szeregowymi występują w praktyce róine odmiany przekładni mieszanych. Zakłada się, że po tych wyjaśnieniach z określaniem przełożeń w tych przekładniach nie będzie problemów.
Przekładnie obiegowe
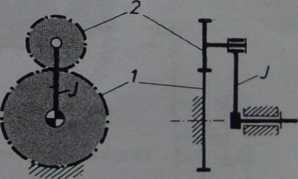
Tak nazywamy (jak już wiadomo), przekładnie, w których osie niektó* rych kół, zwanych obiegowymi (satelitami), wykonują ruch obrotowy wokół osi kół centralnych (słonecznych). Najprostszą przekładnię tego typu przedstawiono na rys. 123* Tu koło 2, aa skutek osadzenia jego osi w obroto-tya jarzmie J, jest satelitą koła centralnego 1. Koła centralne mogą być nieruchome, jak w naszym przykładzie, lub ruchome. Przekładnię, w której co najmniej jedno koło centralne jest nie* ruchome, nazywa się przekładnią planetarna. przekładnię zaś, w której wszystkie koła centralne są ruchome — róż—
„i. , . .__ Rys. 123. Przykład prostej prze-
alcową. Pierwsze z nich, przy stoaunko* v kładni obiegowej
■o małej liczbie kół zębatych i zwartej budowie, umożliwiają realizację nawet bardzo dużych przełożeń. Dzięki możliwości zwielokrotnienia liczby kół obiegowych 1 uzyskania przez to rozłożenia nacisków między zębnych nadają się do przenoszenia dużych ®0cj przy stosunkowo wysokiej sprawności. Wymagają jednak dużej dokładce! wykonania 1 montażu.
Wyszukiwarka
Podobne podstrony:
Rys. 3.58. Przykłady pierścieni zębatych (wg EN 912:1999) [251 a - owalny dwustronny (73 x 130
38443 skanuj0095 (29) Rys. 69. Przykład jednej z pozycji niebolesnych dla stawu biodrowego w coxalgi
DSC00045 Rys. 133* Przykład graficznej metody (określania) przełożeń: a) set* przekładni obiegowej
DSC00041 (2) 120 Rys. 129. Jednorzędowa przekładnia obiegowa róćmy cały mechanizm, traktując go jako
Wagony kolejowe i hamulce (174) o Rys. 10.9. Przykładowe odmiany dźwigniowej przekładni siłowej, sto
Przekładnie Zębate132 Rys. 9.1. Postać konstrukcyjna kół zębatych: a - toczonych, b - kutych Rys. 9.
Przekładnie Zębate139 LO O Rys. 10.1. Przykład najczęściej stosowanych skrzyń odlewniczych reduktor
Image 54 5S b Rys. 3.19. Przykłady silników hydraulicznych [PN-73/M-73023], a - silnik zębaty, b - ś
18 Rys. 16. Przykłady mechanizmów: a) jarzmowy, b) krzywkowy, c) zębaty z członem czynnym w postaci
e) f) Rys. 4. Wybrane przykłady elektropojazdów wystawianych na Hannover Messe 201
więcej podobnych podstron