DSCN1592
86 4. Rozkład sił na gwincie
Jeśli szerokość powierzchni styku (S—dt)/2 jest mała w porównaniu ze średnim promieniem styku, to dla uproszczenia obliczeń można przyjmować promień tarcia równy średniemu promieniowi styku
86 4. Rozkład sił na gwincie
r,
d„+ S 4
(4.15)
Całkowity moment z uwzględnieniem oporów tarcia łba śruby lub nakrętki o powierzchnię elementu łączonego wyraża wzór
(4-16)
Me=M,+M,.
5. Sprawność gwintu
W niesamohamownych połączeniach śrubowych istnieje możliwość zamiany ruchu obrotowego na ruch postępowy, jak również zamiany ruchu postępowego na obrotowy.
Przy zamianie ruchu obrotowego na postępowy, praca włożona na drodze jednego pełnego obrotu jest równa La=2xM„ zaś praca uzyskana L„=QPn, gdzie Ph—nd, tgy.
Z powyższej zależności oraz z równania (4.12) otrzymujemy wzór określający sprawność gwintu
____QPh Q*d'%7_=_tg?_ ,51l
1 Lw 2%M, 2a 0,5d,Qtg(y+e') tgfr+o') ' 1W|
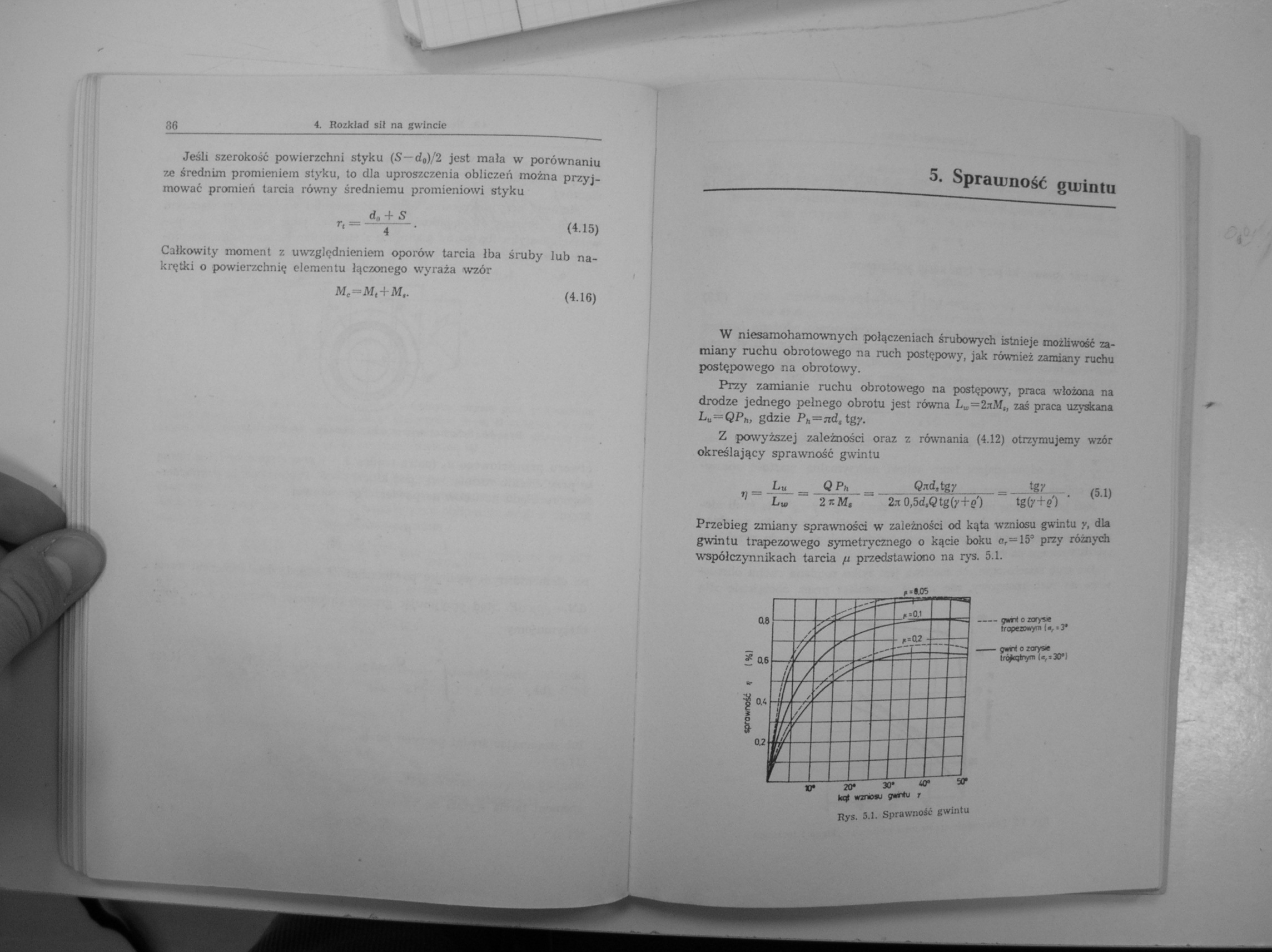
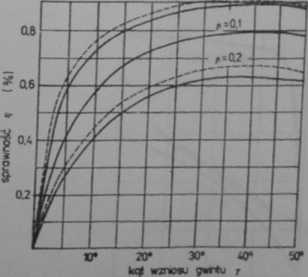
Przebieg zmiany sprawności w zależności od kąta wzniosu gwintu y, dla gwintu trapezowego symetrycznego o kącie boku or=15° przy różnych współczynnikach tarcia /i przedstawiono na rys. 5.1.
P*a05
----5wńt o zarysie
trapezowy™ |«, = 3*
-StwMazwysie
Rys. 9.1. Sprawność gwintu
Wyszukiwarka
Podobne podstrony:
new 41 (2) 86 4. Rozkład sił na gwincie Jeśli szerokość powierzchni styku (S—d0)/2 jest mała w porów
new 41 86 4. Rozkład sił na gwinciew mmmm Jeśli szerokość powierzchni styku (S — c?0)/2 jest mała w
DSCN1552 6 Spis rzeczy 4. Rozkład sil na gwincie ..........
DSCN1591 4. Rozkład sił na gwincie 84 Rys. 4.4. Rozkład sił w złączu z gwintem o dowolnym zarysie pr
new 39 82 4. Rozkład sił na gwincie Rozkład obciążeń przy podnoszeniu ciężaru Q na śrubie (przesuwan
new 2 6 Spis rzeczy 4. Rozkład sił na gwincie...............81 4.1.
54551 new 40 84 4. Rozkład sił na gwincie Rys. 4.4. Rozkład sił w złączu z gwintem o dowolnym zarysi
więcej podobnych podstron