1109145223
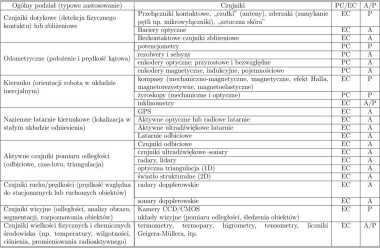
Tabela 1: Klasyfikacja czujników stosowanych w robotach mobilnych (A-aktywne, P-pasywne, PC-proprioceptywne, EC-eksteroceptywne)
32
Struktury sterowania:
1. reaktywne - „nie myśl - reaguj". Struktura równoległa złożona z równolegle wykonujących się prostych reguł typu bodziec-reakcja.
2. behawioralne -„zastanów się nad sposobem zachowania się i działaj". Struktura równoległa -równolegle działające zachowania (mogą być b. złożone).
3. deliberatywne (oparte na modelu) - „dokładnie planuj i dopiero potem działaj". Struktura sekwencyjna S-P-A.
4. hybrydowe - „myśl (planuj) i działaj niezależnie/równolegle". Struktura warstwowa układu sterowania - zazwyczaj trójwarstwowa" warstwa dolna reaktywna, warstwa górna (planowania) wykorzystuje model oraz warstwa pośrednia, łącząca.
Wyszukiwarka
Podobne podstrony:
Tabela 1: Klasyfikacja czujników stosowanych w robotach mobilnych (A-aktywne, P-pasywne, PC-proprioc
Klasyfikacja czujników Ze względu na mierzone wielkości: o Czujniki do pomiaru stanu wewnętrznego ro
Wizualizacja stanu czujników robota mobilnego.Sprawozdanie z wykonania projektu. Maciek Słomka 4 cze
30031 P1080313 9. Układy sensoryczne Rysunek^__ Klasyfikacja stosowanych w robotach przemysłowych uk
3. Klasyfikacja urządzeń elektrycznych Poniżej została przedstawiona tabela klasyfikująca urządzenia
skanuj0019 metod klasyfikacyjnych są stosowane w badaniach medycznych reakcje barwne, takie jak test
IMGG65 1. Opisz metodę pól potencjałowych planowania ruchu robota mobilnego, l 0 &n
więcej podobnych podstron