1933502244
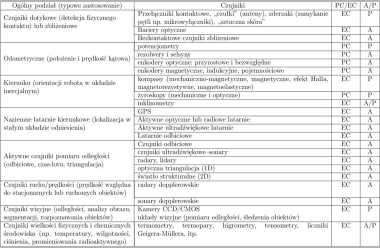
Tabela 1: Klasyfikacja czujników stosowanych w robotach mobilnych (A-aktywne, P-pasywne, PC-proprioceptywne, EC-eksteroceptywne)
Podstawowe własności/parametry czujników
• Szybkość działania - pasmo, częstotliwość. Czas pomiaru dla pomiarów ciągłych, okres próbkowania dla pomiarów dyskretnych.
• Błąd pomiaru. Błąd bezwzględny, względny, średni, maksymalny, itp.
• Odporność. W jakim zakresie może pracować czujnik w stosunku do warunków idealnych? Odporność na różne zakłócenia.
• Wymagania obliczeniowe. Proste czujniki np. dotykowe nie wymagają żadnych nakładów obliczeniowych dla uzyskania wyniku, podczas gdy przetworzenie obrazu z kamery może wymagać bardzo dużych nakładów obliczeniowych.
• Wymagania na moc, wagę i wymiary.
• Koszt.
Własności rzeczywistych czujników:
• występują zakłócenia i szumy pomiarowe
• dostarczają niepełną informację o otoczeniu
• zazwyczaj nie dają się w pełni modelować
Wyszukiwarka
Podobne podstrony:
Tabela 1: Klasyfikacja czujników stosowanych w robotach mobilnych (A-aktywne, P-pasywne, PC-proprioc
Klasyfikacja czujników Ze względu na mierzone wielkości: o Czujniki do pomiaru stanu wewnętrznego ro
Wizualizacja stanu czujników robota mobilnego.Sprawozdanie z wykonania projektu. Maciek Słomka 4 cze
30031 P1080313 9. Układy sensoryczne Rysunek^__ Klasyfikacja stosowanych w robotach przemysłowych uk
3. Klasyfikacja urządzeń elektrycznych Poniżej została przedstawiona tabela klasyfikująca urządzenia
skanuj0019 metod klasyfikacyjnych są stosowane w badaniach medycznych reakcje barwne, takie jak test
IMGG65 1. Opisz metodę pól potencjałowych planowania ruchu robota mobilnego, l 0 &n
więcej podobnych podstron