23835
261
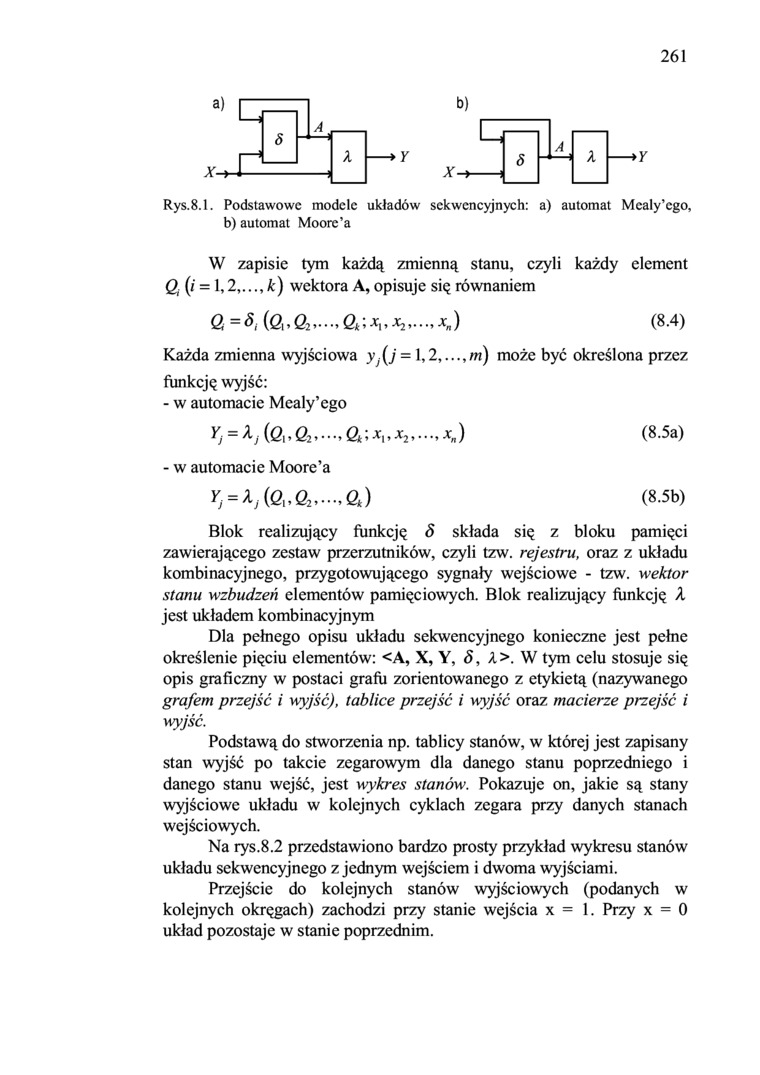
Rys.8.1. Podstawowe modele układów sekwencyjnych: a) automat Mcaly’cgo, b) automat Moorc’a
W zapisie tym każdą zmienną stanu, czyli każdy element Qt (i = 1,2,...,k) wektora A, opisuje się równaniem
Q=Si(Qi,Q2.....i.....x„) (8.4)
Każda zmienna wyjściowa yt(j = 1,2, może być określona przez funkcję wyjść:
- w automacie Mealy’cgo
Yi = \i{Ql,Q2.....Qk-,xl,x,,...,xn) (8.5a)
- w automacie Moore’a
rj = XJ(Ql,Q1,...,Qt) (8.5b)
Blok realizujący funkcję 8 składa się z bloku pamięci
zawierającego zestaw przerzutników, czyli tzw. rejestru, oraz z układu kombinacyjnego, przygotowującego sygnały wejściowe - tzw. wektor stanu wzbudzeń elementów pamięciowych. Blok realizujący funkcję A jest układem kombinacyjnym
Dla pełnego opisu układu sekwencyjnego konieczne jest pełne określenie pięciu elementów: <A, X, Y, <5, A>. W tym celu stosuje się opis graficzny w postaci grafu zorientowanego z etykietą (nazywanego grafem przejść i wyjść), tablice przejść i wyjść oraz macierze przejść i wyjść.
Podstawą do stworzenia np. tablicy stanów, w której jest zapisany stan wyjść po takcie zegarowym dla danego stanu poprzedniego i danego stanu wejść, jest wykres stanów. Pokazuje on, jakie są stany wyjściowe układu w kolejnych cyklach zegara przy danych stanach wejściowych.
Na rys.8.2 przedstawiono bardzo prosty przykład wykresu stanów układu sekwencyjnego z jednym wejściem i dwoma wyjściami.
Przejście do kolejnych stanów wyjściowych (podanych w kolejnych okręgach) zachodzi przy stanie wejścia x = 1. Przy x = 0 układ pozostaje w stanie poprzednim.
Wyszukiwarka
Podobne podstrony:
DSC00047 (39) Układ sekwencyjny Przerzutnik Jest podstawowym elementem układów sekwencyjnych Jego fu
Page17 U KtArDY *•) V = X(A , r),4t+r = <y (a!, r) ą r - aa ) Rys. 4.27Podstawowe modele układów
ark20 U o.) v = x(a V) A‘*r - 5 (A’, X )^ r = iu ) /?y5. ¥.27 Podstawowe modele uk
Lekcja 77.1. Podstawowe człony układów automatyki - c.d. 7.1.1. Człon inercyjny I-rzędu Opis w dzied
Lekcja 88.1. Podstawowe człony układów automatyki - c.d 8.1.1. Człon inercyjny Il-rzędu Transmitancj
8.1. Podstawowe człony układów automatyki - c.d. 17 8.1.3. Człon całkujący Opis w dziedzinie czasu:
3tom081 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 164 Rys. 2.78. Podstawowe rodzaje układów cieplnych elek
Str 3 (3) 4. PODSTAWY TEORII UKŁADÓW CYFROWYCH Rys. 4.23 Występowanie impulsów hazardu dynamicznego
8.1. Podstawowe człony układów automatyki - c.d. 17 8.1.3. Człon całkujący Opis w dziedzinie czasu:
Podstawowe elementy w automatyce • Podstawowe elementy układów automatyki można podzielić ze względu
Rejestry Rejestry należą do układów sekwencyjnych (pamiętających) Podstawowym przykładem rejestru
Image048Rozdzial3 Rozdział PODSTAWY TEORII UKŁADÓW CYFROWYCH3.1. Wstęp Algebra Boo
Image060 3.5. Podstawowe funktory układów cyfrowych Układy cyfrowe dzieli się na dwie podstawowe gru
Rys. 2. Nowe modele robotów Kawasaki; a) BX200L, b) RA06L, c) z serii RA04 z wyposażeniem TABLICA. R
więcej podobnych podstron