Page17
*•) V = X(A', r)
,4t+r = <y (a!, r) ą r - aa')
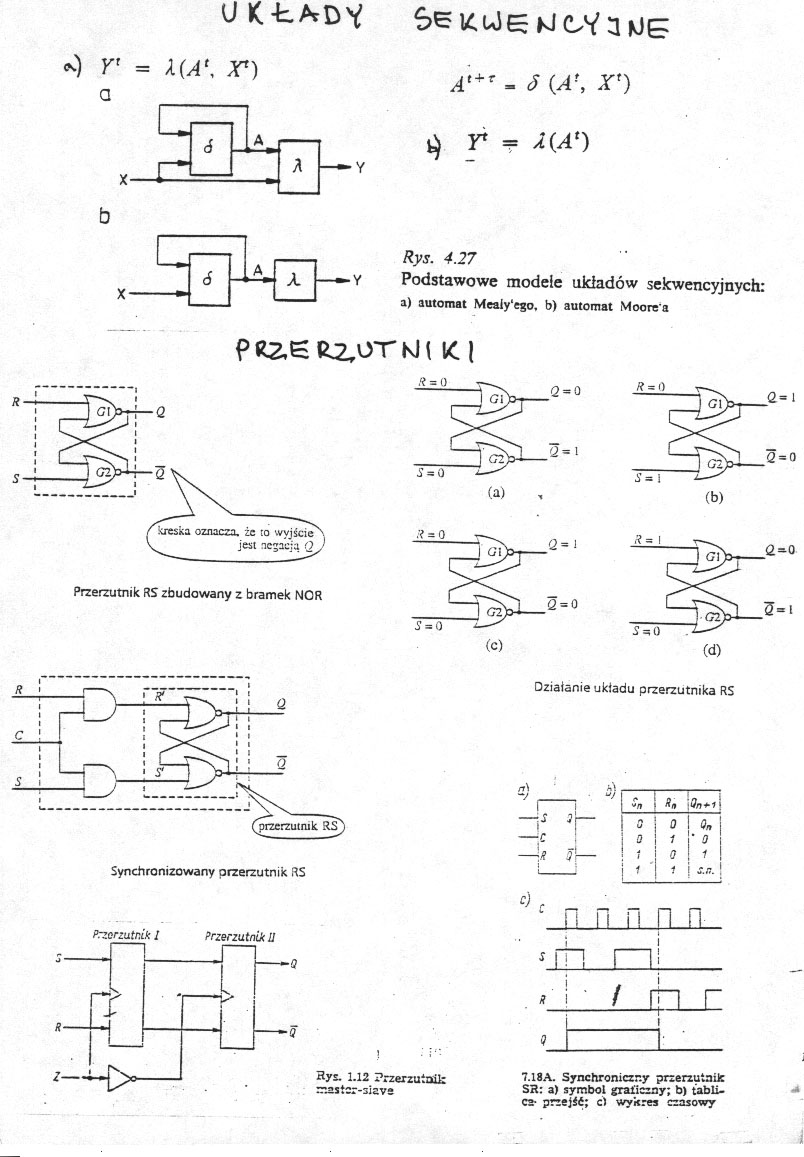
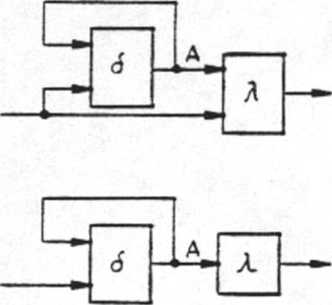
Rys. 4.27
Podstawowe modele układów sekwencyjnych:
a) automat MeaIy'ego, b) automat Moore a
? R2,e B^or KJ nc i
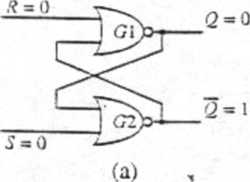
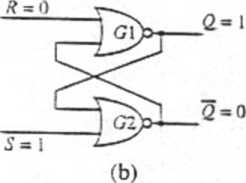
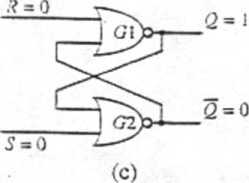
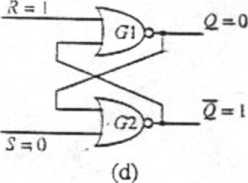
Działanie układu przerzutnika RS
Przcrzutnik I Prze rzutnik U
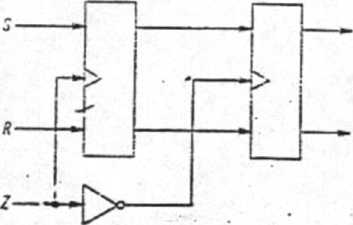
Hys. 1.12 Przerzuiaik rr.nstcr-3iave
|
■V 1 |
o ' |
<?ił j | |
|
—£ 5 —> 5 : |
r _ |
0 1 Q A 1 * ' |
o j f *5 0 i 1 1 j s.n. j |
|
r,‘ r |
i n |
±L |
n n |
|
' *fł |
i n |
i | |
|
j * i |
i |
r |
p r |
|
9 |
I | ||
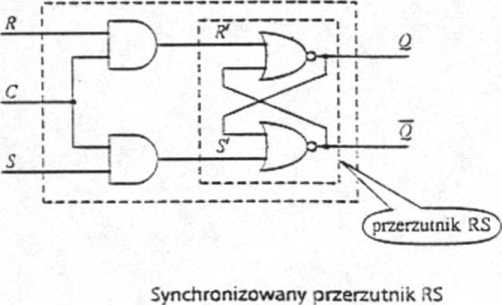
7.18A. Synchroniczny przerzutnilc SR: a) symbol graficzny; b) tablica- przejść; c) wykres czasowy
Wyszukiwarka
Podobne podstrony:
261 Rys.8.1. Podstawowe modele układów sekwencyjnych: a) automat Mcaly’cgo, b) automat Moorc’a W
Rys. 2. Nowe modele robotów Kawasaki; a) BX200L, b) RA06L, c) z serii RA04 z wyposażeniem TABLICA. R
skanuj0470 p AA Rys. 4.58. Nomogram służący do odczytywania współrzędnych cylindrycznych węzłów siec
112 ZESZYTY NAUKOWE AKADEMII MORSKIE) W GDYNI, nr 78, marzec 2013 Rys. 2. Definicja wprowadzonych uk
4098 1 Cxi Rxi H
98 M. Kozłowski Rys.2. Koszty budowy układów napędowych tramwaju dla warunków komunikacyjnych. Wpływ
skanowanie0016 (2) X4oęup. ^estM Jt ■da/4t AA ^oiaoj /^kMuoiudc^/ ____________:_
Zdjecie1079 ac ae Rys, 1.2. Schemat dwuohwodowych układów hamulcowych stosowanych w samochodach osob
Wprowadzenie « Modele układów mechanicznych opisują ruch ciał sztywnych obserwowany względem
laborki z techniki nadawczej cw313 3# Pomiar ©zęstotliweśei modułująeej W układzie pomiarowym jak a
Rys. 18.3. Mechanizm korbowo-tłokowy silnika spalinowego. Rys. 18.4. Schematy układów rozrządu
50 (290) Z przebiegu charakterystyk mechanicznych (rys. 23.10) układów stabilizacji prędkości kątowe
20 Rys. 19. Przykłady układów z ruchliwością lokalną jąc ruchu członu biernego 4. Wynika to z kolist
Idea wykładówZakres tematyczny D Wprowadzenie do tematyki wykładów H Modele układów jednowymiarowych
więcej podobnych podstron