1484605287
20
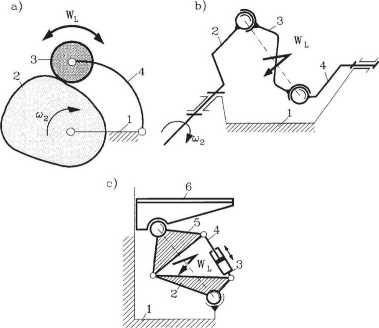
Rys. 19. Przykłady układów z ruchliwością lokalną
jąc ruchu członu biernego 4. Wynika to z kolistego kształtu krążka 3 i jego centralnego ułożyskowania. Tego typu lokalne stopnie swobody jednego członu (lub grupy członów), które nie mają wpływu na ruchy pozostałych członów łańcucha nazywa się ruchliwością lokalną i oznacza się przez WL .
Istotę tego zjawiska można prześledzić również na przykładzie układu przestrzennego z rys. 19b. Łącznik 3 pośredniczący w przekazywaniu ruchu z członu czynnego 2 na człon bierny 4 może, jak widać z rysunku, obracać się wokół osi przechodzącej przez środki obu przegubów kulistych. Ruch ten jest nieistotny ze względu na realizowany ruch członu biernego, ale zostanie w rachunku odnotowany. Ruchliwość tego układu obliczona ze wzoru (1) wynosi bowiem:
W = 6(4 - l)-5x2-3><2 = 2
Należy to rozumieć tak, że W = 2 oznacza ruchliwość użyteczną członu 4 (W = 1) oraz ruchliwość lokalną członu 3 (WL = 1).
Na przytoczonych przykładach (rys. 19a, b) zilustrowano ruchliwość lokalną członu pojedynczego. W pewnych przypadkach ruchliwość lokalna może dotyczyć również całych grup członów, np. grupy członów 2, 3, 4 i 5 w układzie napędowym platformy 6 przedstawionym na rys. 19c.
Wyszukiwarka
Podobne podstrony:
19 Rys. 17. Przykłady układów mechanicznych: a) układ zaczepu, b) układ zawiesia 2. Silniki i genera
metalurgia94 Argon Azot a) b) c) Rys. 19. Przykłady rafinac
Rys.18. Rozmieszczenie znaczników podczas pomiaru [20] Rys. 19. Wyniki pomiaru z dwóch różnych miejs
20 J I Rys. 19, JW = 0,1 . U = 0,1 . 100 = 10 A UW.J — 89,44 . 11,18 = 8 . 11,18* = 8 . 125 « = 1000
86 (72) SZCZEGÓŁ A (15) 33/ Rys. 6-19. Przykład rysunku szczegółu - węzeł kratownicy nitowanej Zgodn
- 46 - III a-1 mb -1 iii a-6 • uib-6 Rys*19* Przykłady rozmieszczenia wykrojów
Biomechanika wyklady0014 Rys.3 przedstawia przykład obliczeń ruchliwości łańcucha otwartego i zamkni
Image 54 5S b Rys. 3.19. Przykłady silników hydraulicznych [PN-73/M-73023], a - silnik zębaty, b - ś
97 [ www potrzebujegotowki pl ] Procesy magazynowe Rys. 3.19. Przykładowa charakterystyka wózka podn
23 luty 07 (28) Tablica 1.2 Typowe grupy strukturalne Rys. 1.19. Przykłady zamiany grupy strukturaln
2tom303 8. ENERGOELEKTRONIKA 608 8. ENERGOELEKTRONIKA 608 Rys. 8.35. Przykłady układów odciążających
DSC00580 w, Rys. 18.1 Przez analogię do dynamicznego równania ruchu punktu materialnego, wynikająceg
str262 263 Dalszy ciąg obliczania rozmieszczenia gwoździ 4 x 110 mm w węzłach omówiono na przykładzi
396 (7) 396 Podstawy nawgaqi morskie) Rys. 19.20. Przykłady typowych krzywych ptywu mieszanego [11]
img169 160 160 140 120 100 80 60 40 20 0 -20 Rys. 6.4. Prosta regresji dla danych z przykładu 26.8.
więcej podobnych podstron