396 (7)
396 Podstawy nawgaqi morskie)
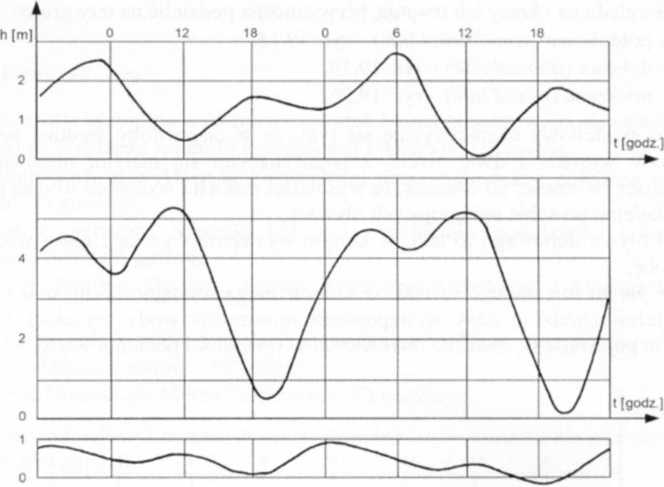
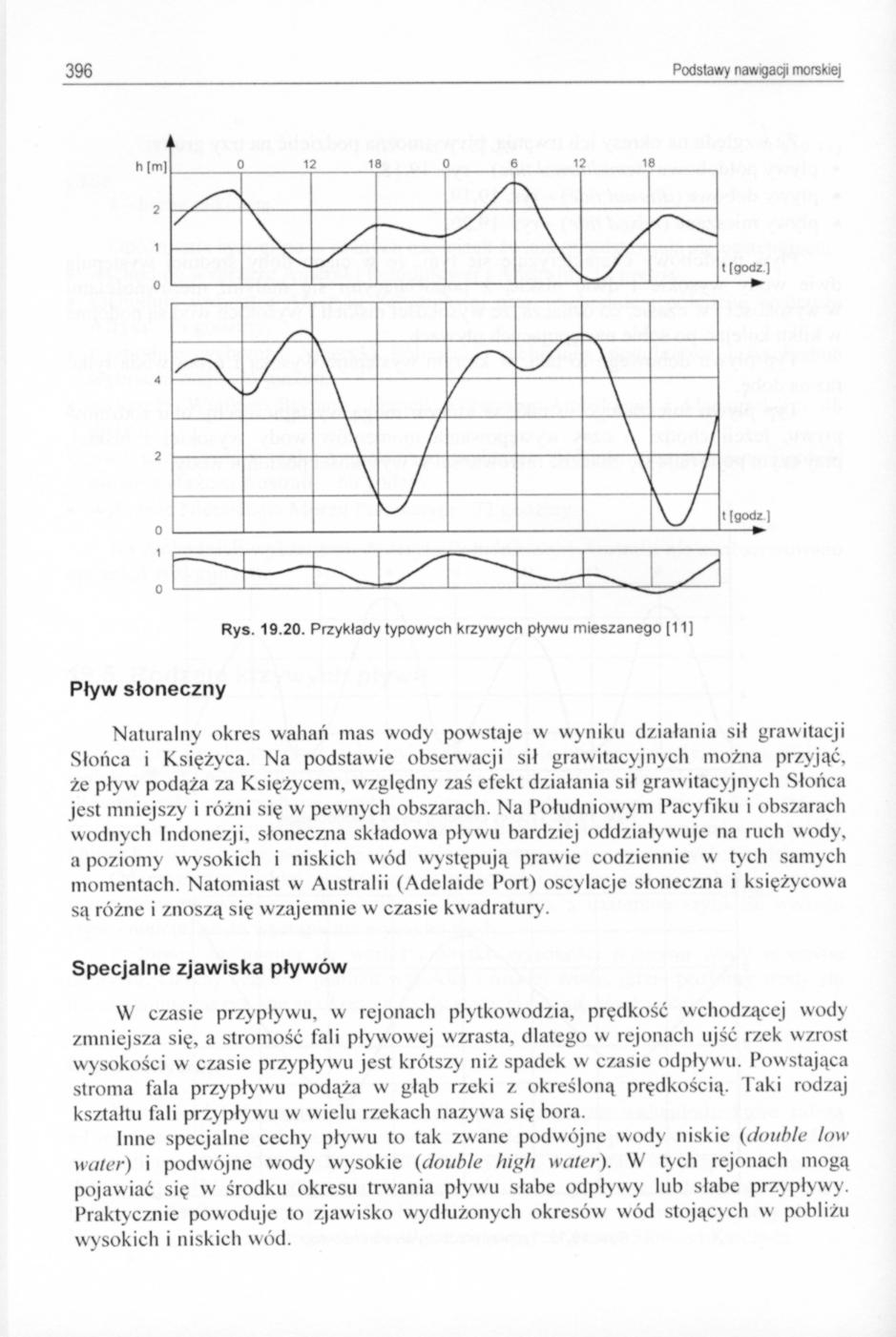
Rys. 19.20. Przykłady typowych krzywych ptywu mieszanego [11]
Pływ słoneczny
Naturalny okres wahań mas wody powstaje w wyniku działania sił grawitacji Słońca i Księżyca. Na podstawie obserwacji sił grawitacyjnych można przyjąć, że pływ podąża za Księżycem, względny zaś efekt działania sił grawitacyjnych Słońca jest mniejszy i różni się w pewnych obszarach. Na Południowym Pacyfiku i obszarach wodnych Indonezji, słoneczna składowa pływu bardziej oddziaływuje na ruch wody. a poziomy wysokich i niskich wód występują prawie codziennie w tych samych momentach. Natomiast w Australii (Adelaide Port) oscylacje słoneczna i księżycowa są różne i znoszą się wzajemnie w czasie kwadratury.
Specjalne zjawiska pływów
W czasie przypływu, w rejonach płytkowodzia, prędkość wchodzącej wody zmniejsza się, a stromość fali pływowej wzrasta, dlatego w rejonach ujść rzek wzrost wysokości w czasie przypływu jest krótszy niż. spadek w czasie odpływu. Powstająca stroma fala przypływu podąża w głąb rzeki z określoną prędkością. Taki rodzaj kształtu fali przypływu w wielu rzekach nazywa się bora.
Inne specjalne cechy pływu to tak zwane podwójne wody niskie (double Iow waler) i podwójne wody wysokie (double high water). W tych rejonach mogą pojawiać się w środku okresu trwania pływu słabe odpływy lub słabe przypływy. Praktycznie powoduje to zjawisko wydłużonych okresów wód stojących w pobliżu wysokich i niskich wód.
Wyszukiwarka
Podobne podstrony:
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
332 (12) 332 Podstawy nawgaqi morskie) Rys. 17.7. Sposób modelowania prognoz falowania oceanicznego
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
5 (2005) 19. Atakowanie rozpoczęte odebraniem piłki przeciwnikowi (rys. 19). 20. Kontratakowanie po
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
292 (14) 292 Podstawy nawgaqi morskiej Metoda polega na wyznaczeniu na mapie obiektów dobrze odbijaj
20 J I Rys. 19, JW = 0,1 . U = 0,1 . 100 = 10 A UW.J — 89,44 . 11,18 = 8 . 11,18* = 8 . 125 « = 1000
438 (7) 438 Podstawy nawigaqi morskie) Na rysunku 20.7 pokazany jest szkic rejonu kanału angielskieg
image1�39 86 4. Badanie podstawowych właściwości mechanicznych Rys. 4.19. Próbka do badania udarnośc
Rys 19 i 20. Plan krzyżownicy z kierownicami rozjazdu R=500 nowej konstrukcji z pokazaniem zwymiarow
360 (8) 360 Podstawy nawigaqi morskiej Rys. 18.14b. Trasa mimmalnoczasowa na okres 5 dni, dla izochr
404 (7) 404 Podstawy nawigacji morskiej c d tabeli 19 6 1 2 3 3 Indie - Birma do 11 do 7 - Bhaw
414 (6) 414 Podstawy nawigacji morskiej stąd (19.24) h0 = hHH/?(sin 7t) Przykład: Obliczyć wysokość
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
S ONECZNIKIN130053bd1f0 miejsce na nadruk2 1 i i L 8 9 10 u 1? ,6 17 18 19 20 2[ 22 2S 26 2? 28 29i
więcej podobnych podstron