404 (7)
404 Podstawy nawigacji morskiej
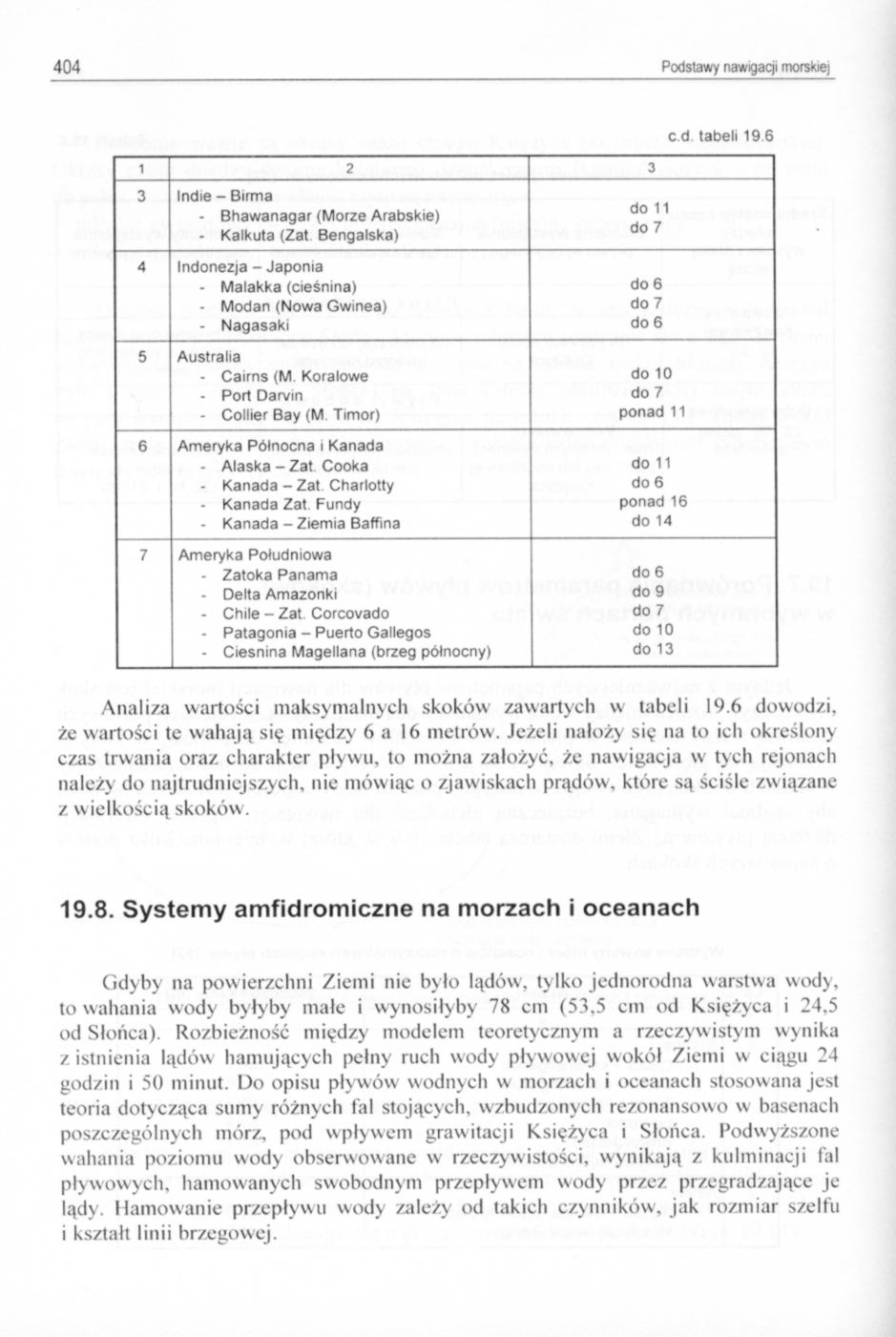
c d tabeli 19 6
|
1 |
2 |
3 |
|
3 |
Indie - Birma |
do 11 do 7 |
|
- Bhawanagar (Morze Arabskie) • Kalkuta (Zat Bengalska) | ||
|
4 |
Indonezja - Japonia | |
|
• Malakka (cieśnina) |
do 6 | |
|
- Modan (Nowa Gwinea) |
do 7 | |
|
- Nagasaki |
do 6 | |
|
5 |
Australia | |
|
- Cairns (M. Koralowe |
do 10 | |
|
- Port Darvin |
do 7 | |
|
- Collier Bay (M. Timor) |
ponad 11 | |
|
6 |
Ameryka Północna i Kanada | |
|
- Alaska - Zat Cooka |
do 11 | |
|
- Kanada - Zat Charlotty |
do 6 | |
|
- Kanada Zat Fundy |
ponad 16 | |
|
- Kanada - Ziemia Baffina |
do 14 | |
|
7 |
Ameryka Południowa | |
|
- Zatoka Panama |
do 6 | |
|
- Delta Amazonki |
do 9 | |
|
- Chile - Zat. Corcovado |
do 7 | |
|
- Patagonia - Puerto Gallegos |
do 10 | |
|
- Cieśnina Magellana (brzeg północny) |
do 13 |
Analiza wartości maksymalnych skoków zawartych w tabeli 19.6 dowodzi, że wartości te wahają się między 6 a I6 metrów. Jeżeli nałoży się na to ich określony czas trwania oraz charakter pływu, to można założyć, że nawigacja w tych rejonach należy do najtrudniejszych, nie mówiąc o zjawiskach prądów, które są ściśle związane z wielkością skoków.
19.8. Systemy amfidromiczne na morzach i oceanach
Gdyby na powierzchni Ziemi nie było lądów, tylko jednorodna warstwa wody, to wahania wody byłyby małe i wynosiłyby 78 cm (53.5 cm od Księżyca i 24.5 od Słońca). Rozbieżność między modelem teoretycznym a rzeczywistym wynika z istnienia lądów hamujących pełny ruch wody pływowej wokół Ziemi w ciągu 24 godzin i 50 minut. Do opisu pływów wodnych w morzach i oceanach stosowana jest teoria dotycząca sumy różnych lal stojących, wzbudzonych rezonansowo w basenach poszczególnych mórz, pod wpływem grawitacji Księżyca i Słońca. Podwyższone wahania poziomu wody obserwowane w rzeczywistości, wynikają z kulminacji fal pływowych, hamowanych swobodnym przepływem wody przez przegradzające je lądy. Hamowanie przepływu wody zależy od takich czynników, jak rozmiar szelfu i kształt linii brzegowej.
Wyszukiwarka
Podobne podstrony:
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
414 (6) 414 Podstawy nawigacji morskiej stąd (19.24) h0 = hHH/?(sin 7t) Przykład: Obliczyć wysokość
370 (10) 370 Podstawy nawigaqi morskie] Bliższa analiza zadań od I do 5 sprecyzuje plan działania ob
378 (9) 378 Podstawy nawigacji morskiej Na rysunkach 19.2 i 19.3 pokazane są związki między poziomam
384 (9) 384 Podstawy nawigaqi morskiej cos a-l) [m/fł]<V (19.7) gdzie: R: - promień Ziemi, ntK —
394 (7) 394 Podstawy nawigaqi morskie) A7 = *(l2h25m) (19.11) gdzie: k - liczba całkowita. Opóźnieni
400 (6) 400 Podstawy nawigaqi morskiej fi ORBITA ZIEMI Rys. 19.22. Wptyw fazy Księżyca na wysokość s
406 (6) 406 Podstawy nawigacji morskiej 9° W Rys. 19.28. Amfidromiczna mapka pływów Morza Północnego
234 (19) 234 Podstawy nawigacji morskiej południka odniesienia, liczony zgodnie z ruchem wskazówek z
248 (19) 248 Podstawy nawigacji morskiej13.7. Pozycja z dwóch odległości na jeden obiekt Jeżeli nie
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
więcej podobnych podstron