234 (19)
234 Podstawy nawigacji morskiej
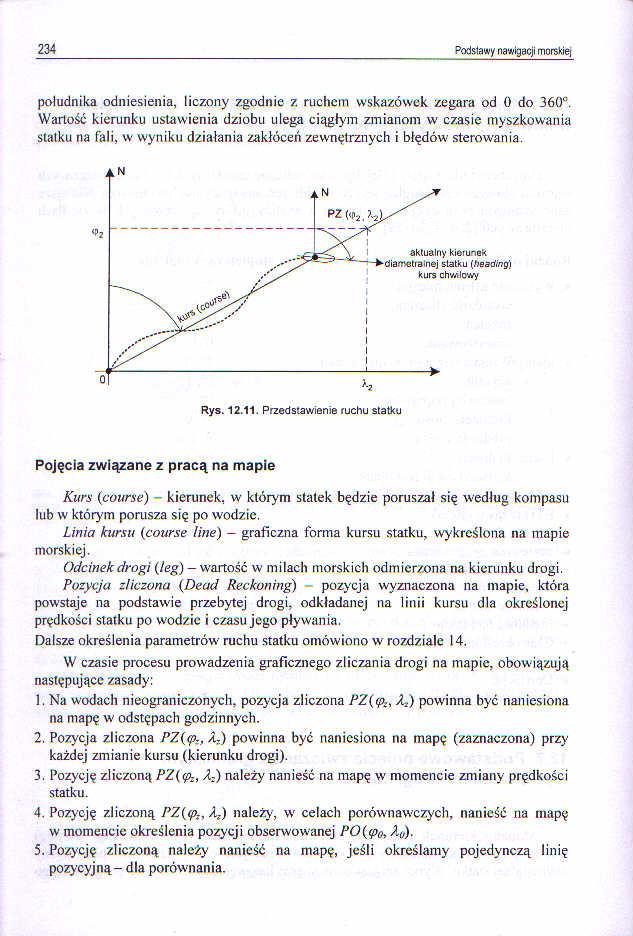
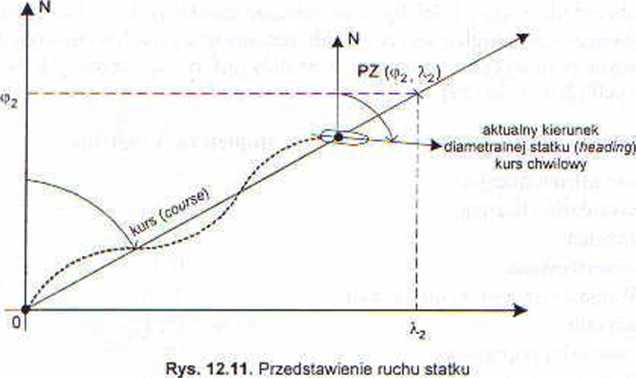
południka odniesienia, liczony zgodnie z ruchem wskazówek zegara od 0 do 360°. Wartość kierunku ustawienia dziobu ulega ciągłym zmianom w czasie myszkowania statku na fali, w wyniku działania zakłóceń zewnętrznych i błędów sterowania.
Pojęcia związane z pracą na mapie
Kurs (course) kierunek, w którym statek będzie poruszał się według kompasu lub w którym porusza się po wodzie.
Linia kursu (course linę) - graficzna forma kursu statku, wykreślona na mapie morskiej.
Odcinek drogi (/eg) - wartość w milach morskich odmierzona na kierunku drogi.
Pozycja zliczona (Dead Reckoning) pozycja wyznaczona na mapie, która powstaje na podstawie przebytej drogi, odkładanej na linii kursu dla określonej prędkości statku po wodzie i czasu jego pływania.
Dalsze określenia parametrów- ruchu statku omówiono w rozdziale 14.
W czasie procesu prowadzenia graficznego zliczania drogi na mapie, obowiązują następujące zasady:
1. Na wodach nieograniczonych, pozycja zliczona PZ((p.s Xj) powinna być naniesiona na mapę w odstępach godzinnych.
2. Pozycja zliczona PZ(<pr, a.) powinna być naniesiona na mapę (zaznaczona) przy każdej zmianie kursu (kierunku drogi).
3. Pozycję zliczoną PZ(q>Zi X2) należy nanieść na mapę w momencie zmiany prędkości statku.
4. Pozycję zliczoną PZ(<p.,A,z) należy, w celach porównawczych, nanieść na mapę w momencie określenia pozycji obserwowanej PO((p0, Af/).
5. Pozycję zliczoną należy nanieść na mapę, jeśli określamy pojedynczą linię pozycyjną- dla porównania.
Wyszukiwarka
Podobne podstrony:
248 (19) 248 Podstawy nawigacji morskiej13.7. Pozycja z dwóch odległości na jeden obiekt Jeżeli nie
240 (18) 240 Podstawy nawigacji morskiej Wartość wektora r zejścia statku z osi toru zależy od dwóch
378 (9) 378 Podstawy nawigacji morskiej Na rysunkach 19.2 i 19.3 pokazane są związki między poziomam
384 (9) 384 Podstawy nawigaqi morskiej cos a-l) [m/fł]<V (19.7) gdzie: R: - promień Ziemi, ntK —
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
394 (7) 394 Podstawy nawigaqi morskie) A7 = *(l2h25m) (19.11) gdzie: k - liczba całkowita. Opóźnieni
400 (6) 400 Podstawy nawigaqi morskiej fi ORBITA ZIEMI Rys. 19.22. Wptyw fazy Księżyca na wysokość s
404 (7) 404 Podstawy nawigacji morskiej c d tabeli 19 6 1 2 3 3 Indie - Birma do 11 do 7 - Bhaw
406 (6) 406 Podstawy nawigacji morskiej 9° W Rys. 19.28. Amfidromiczna mapka pływów Morza Północnego
414 (6) 414 Podstawy nawigacji morskiej stąd (19.24) h0 = hHH/?(sin 7t) Przykład: Obliczyć wysokość
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
więcej podobnych podstron