240 (18)
240 Podstawy nawigacji morskiej
Wartość wektora r zejścia statku z osi toru zależy od dwóch parametrów: odległości znaków od siebie oraz odległości statku od przedniego znaku nabieżnika. Wektor r oblicza się według ogólnego wzoru:
_ _ ii(d + ,v) s siny
Do obliczeń praktycznych stosowany jest następujący wzór:
r = 0,00029 [ml (13.5)
s
gdzie:
d-odległość obserwatora od znaku F [m), s - odległość między znakiem F i R [m].
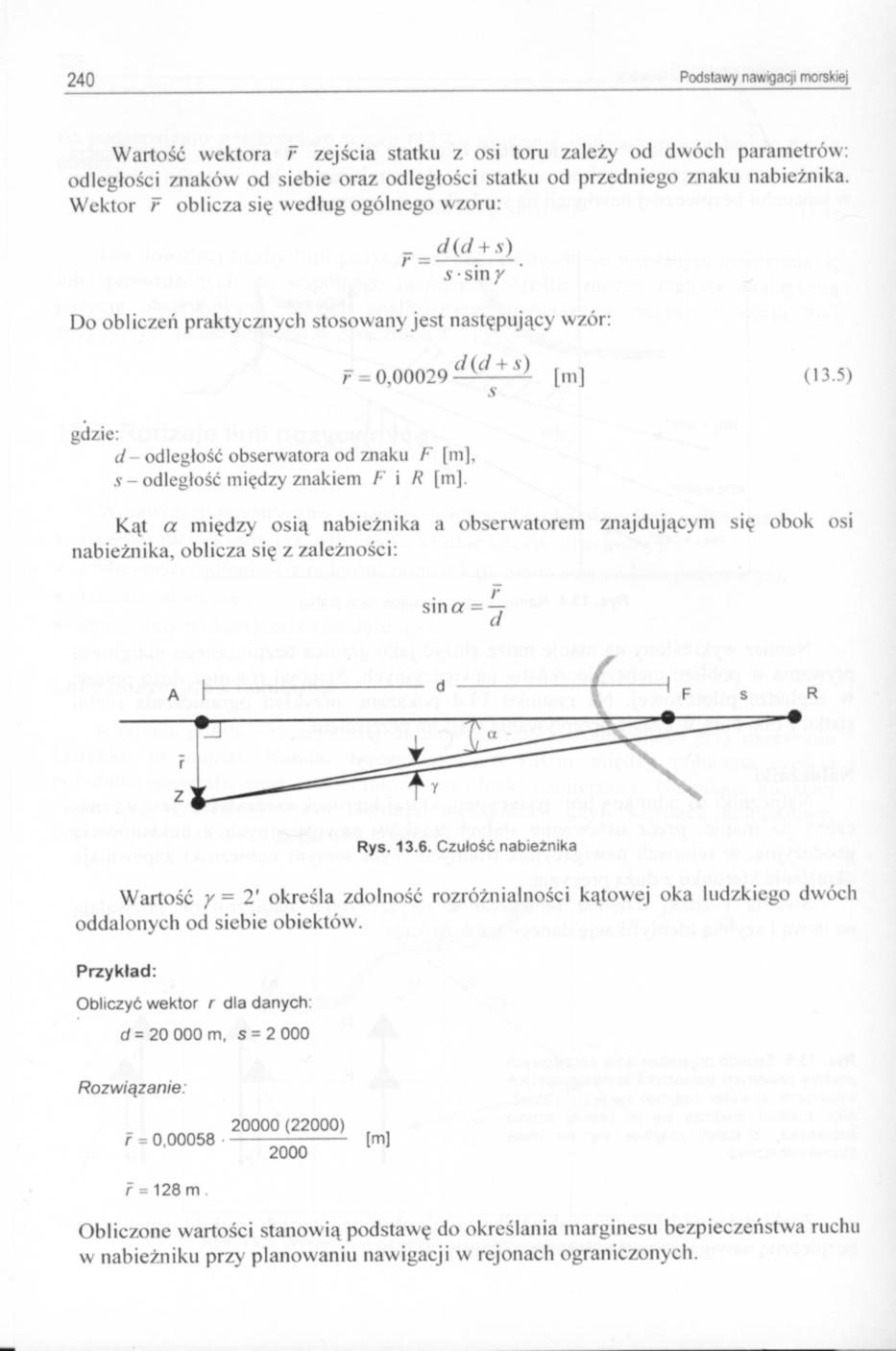
Kąt a między osią nabieżnika a obserwatorem znajdującym się obok osi nabieżnika, oblicza się z zależności:
/•
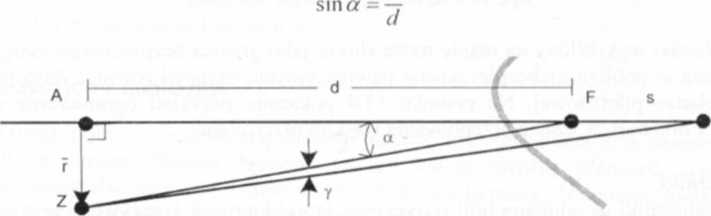
Rys. 13.6. Czułość nabieżnika
Wartość y = 2' określa zdolność rozróżnialności kątowej oka ludzkiego dwóch oddalonych od siebie obiektów.
Przykład:
Obliczyć wektor r dla danych: d= 20 000 m. s = 2 000
Rozwiązanie:
r
0.00058
20000(22000) 2000
[m]
r = 128 m
Obliczone wartości stanowią podstawę do określania marginesu bezpieczeństwa ruchu w nabieżniku przy planowaniu nawigacji w rejonach ograniczonych.
Wyszukiwarka
Podobne podstrony:
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
246 (18) 246 Podstawy nawigacji morskiej ___ KDd Rys. 13.11. Granice niebezpieczeństwa wyznaczone
262 (14) 262 Podstawy nawigacji morskiej Wartość dryfu określa algebraiczna różnica między KDw i KR:
234 (19) 234 Podstawy nawigacji morskiej południka odniesienia, liczony zgodnie z ruchem wskazówek z
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
270 (16) 270 Podstawy nawigacji morskiej 270 Podstawy nawigacji morskiej ABt.(BC) - prędkość statku
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
318 (14) 318 Podstawy nawigacji morskie) Proces wyboru bezpiecznego i optymalnego wektora ruchu, rea
340 (14) 340 Podstawy nawigacji morskiej Z rysunku 18.4 wynika, że pole falowania jest przesunięte (
360 (8) 360 Podstawy nawigaqi morskiej Rys. 18.14b. Trasa mimmalnoczasowa na okres 5 dni, dla izochr
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
więcej podobnych podstron