290 (13)
290 Podstawy nawigacji morskiej
3) w czasie ruchu należy śledzić przyjęte odległości; odległość może być mierzona dostępnymi metodami, za pomocą interscanu, stałych okręgów odległości lub ruchomego kręgu odległości;
4) linie równoległe wykreśla się na rzutniku refleksyjnym; można również wykorzystać stałe linie równoległe na ruchomym rzutniku;
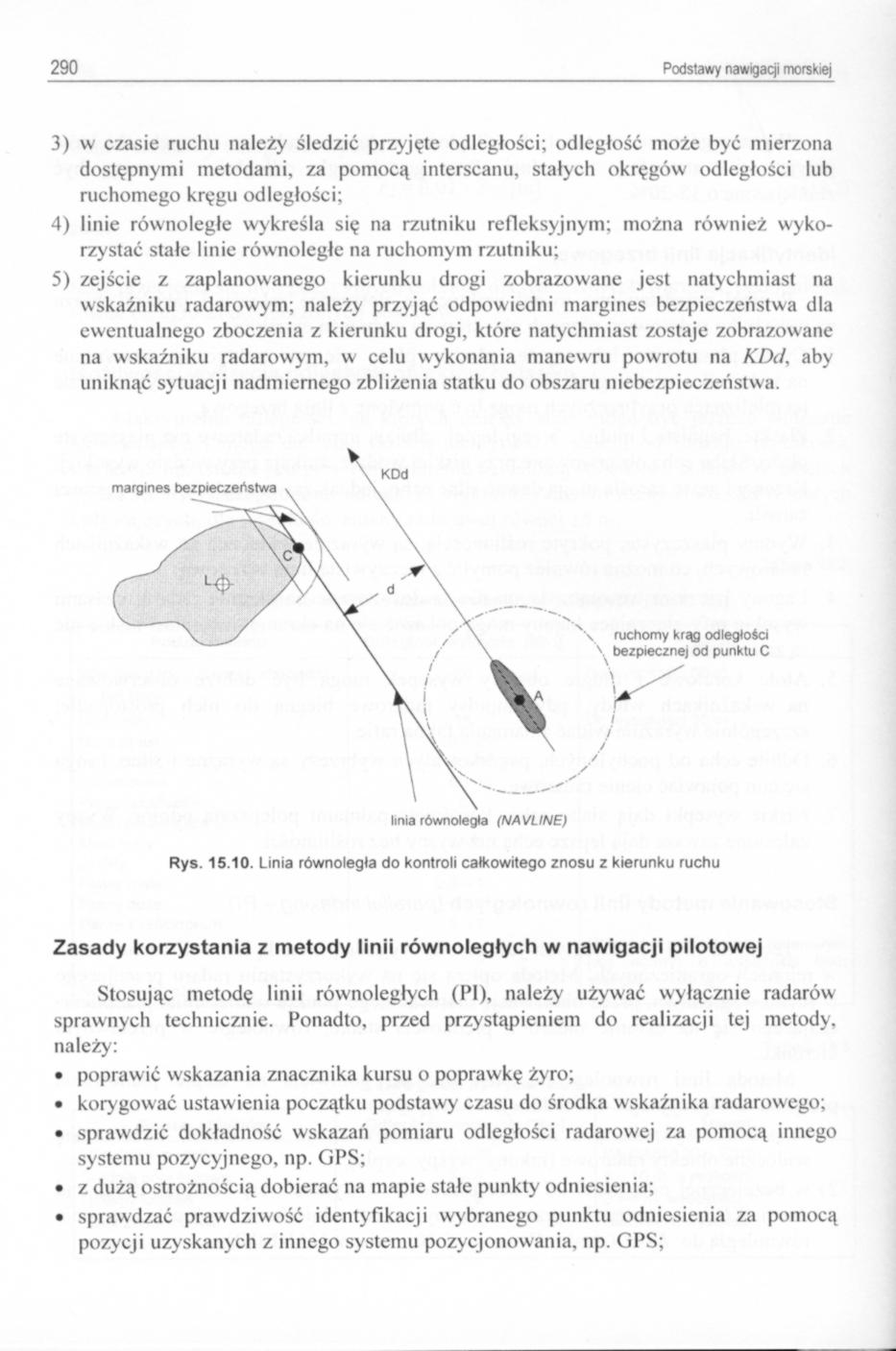
5) zejście z zaplanowanego kierunku drogi zobrazowane jest natychmiast na wskaźniku radarowym; należy przyjąć odpowiedni margines bezpieczeństwa dla ewentualnego zboczenia z kierunku drogi, które natychmiast zostaje zobrazowane na wskaźniku radarowym, w celu wykonania manewru powrotu na KDd, aby uniknąć sytuacji nadmiernego zbliżenia statku do obszaru niebezpieczeństwa.
margines bezpieczeństwa
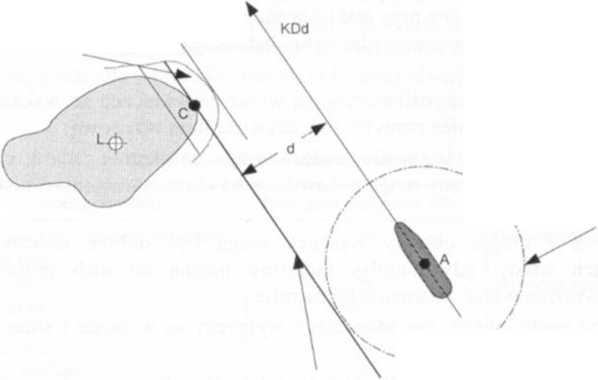
\ ruchomy krąg odległości \ bezpiecznej od punktu C
linia równoległa (NAVLINE)
Rys. 15.10. Linia równoległa do kontroli całkowitego znosu z kierunku ruchu
Zasady korzystania z metody linii równoległych w nawigacji pilotowej
Stosując metodę linii równoległych (PI), należy używać wyłącznie radarów sprawnych technicznie. Ponadto, przed przystąpieniem do realizacji tej metody, należy;
• poprawić wskazania znacznika kursu o poprawkę żyro;
• korygować ustawienia początku podstawy czasu do środka wskaźnika radarowego;
• sprawdzić dokładność wskazań pomiaru odległości radarowej za pomocą innego systemu pozycyjnego, np. GPS;
• z dużą ostrożnością dobierać na mapie stałe punkty odniesienia;
• sprawdzać prawdziwość identyfikacji wybranego punktu odniesienia za pomocą pozycji uzyskanych z innego systemu pozycjonowania, np. GPS;
Wyszukiwarka
Podobne podstrony:
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
320 (13) 320 Podstawy nawigacji morskiej z metod stosowanych w automatyce, przy rozpatrywaniu proces
336 (13) 336 Podstawy nawigaqi morskiej Wiele instytutów badawczych na świecie od lal zajmuje się pr
338 (13) 338 Podstawy nawigacji morskiej 3. Minimalizacja uszkodzeń sztormowych ła
352 (13) 352 Podstawy nawigaqi morskiej 9. Przeanalizowanie informacji klimatyczny
304 (15) 304 Podstawy nawigacji morskiej • obserwowanie przebytej drogi według rad
318 (14) 318 Podstawy nawigacji morskie) Proces wyboru bezpiecznego i optymalnego wektora ruchu, rea
422 (7) 422 Podstawy nawigacji morskiej19.13. Prognozy prądów według Admiralty Tide Tables (ATT) W t
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
246 (18) 246 Podstawy nawigacji morskiej ___ KDd Rys. 13.11. Granice niebezpieczeństwa wyznaczone
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
więcej podobnych podstron