304 (15)
304 Podstawy nawigacji morskiej
• obserwowanie przebytej drogi według radaru, w ruchu rzeczywistym, jednoczesnym pomiarem czasu przejścia (znana odległość między stałymi obiektami oraz czas przejścia);
• korzystanie z informacji o prędkości z odbiornika GPS.
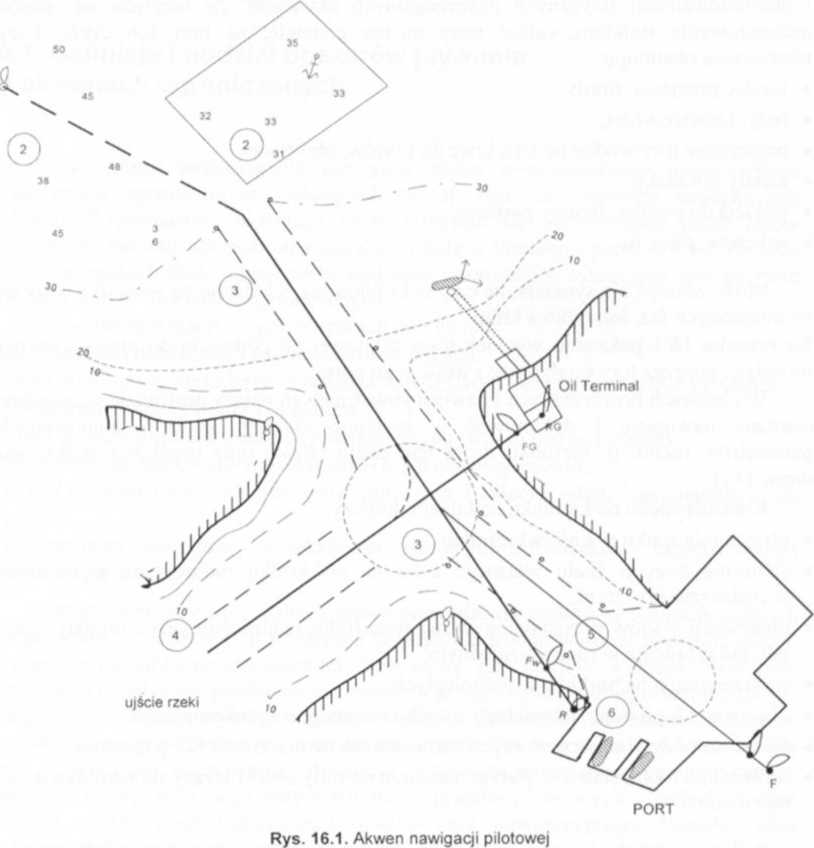
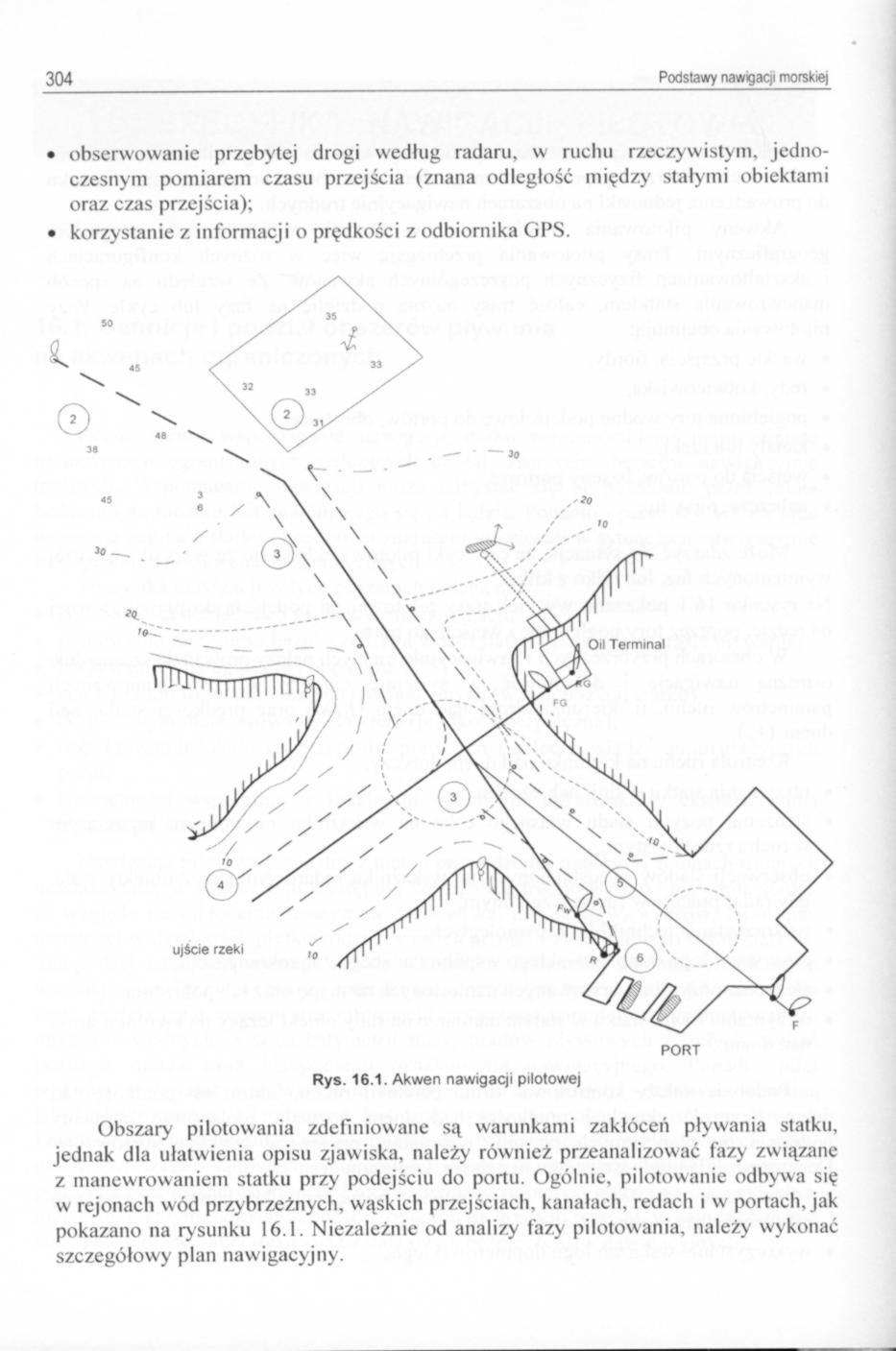
Obszary pilotowania zdefiniowane są warunkami zakłóceń pływania statku, jednak dla ułatwienia opisu zjawiska, należy również przeanalizować fazy związane z manewrowaniem statku przy podejściu do portu. Ogólnie, pilotowanie odbywa się w rejonach wód przybrzeżnych, wąskich przejściach, kanałach, redach i w portach, jak pokazano na rysunku 16.1. Niezależnie od analizy fazy pilotowania, należy wykonać szczegółowy plan nawigacyjny.
Wyszukiwarka
Podobne podstrony:
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
300 (15) 300 Podstawy nawigaqi morskiej15.5. Zalety radaru i jego ograniczenia Urządzenia radarowe,
328 (15) 328 Podstawy nawigacji morskiej 7) charakterystyki na wietrze; dryf wiatr
250 (15) 250 Podstawy nawigacji morskiej Błędy systematyczne można usunąć przez zastosowanie protrak
252 (15) 252 Podstawy nawigaqi morskiej Dobre wyniki dokładności pozycji można uzyskać, gdy trzy obi
254 (15) 254 Podstawy nawigaqi morskiej Można wymienić wiele innych możliwości określania pozycji w
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
318 (14) 318 Podstawy nawigacji morskie) Proces wyboru bezpiecznego i optymalnego wektora ruchu, rea
422 (7) 422 Podstawy nawigacji morskiej19.13. Prognozy prądów według Admiralty Tide Tables (ATT) W t
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
więcej podobnych podstron