274 (15)
274 Podstawy nawigaqi morskiej
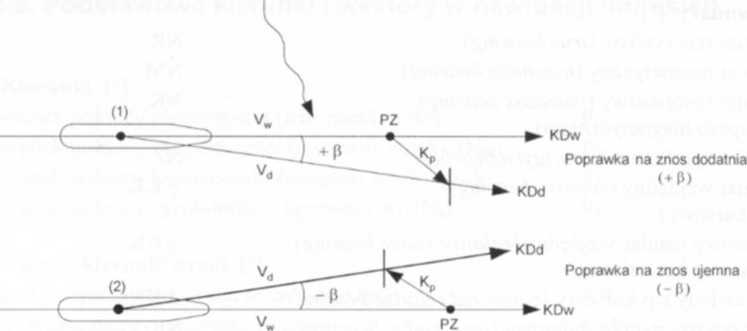
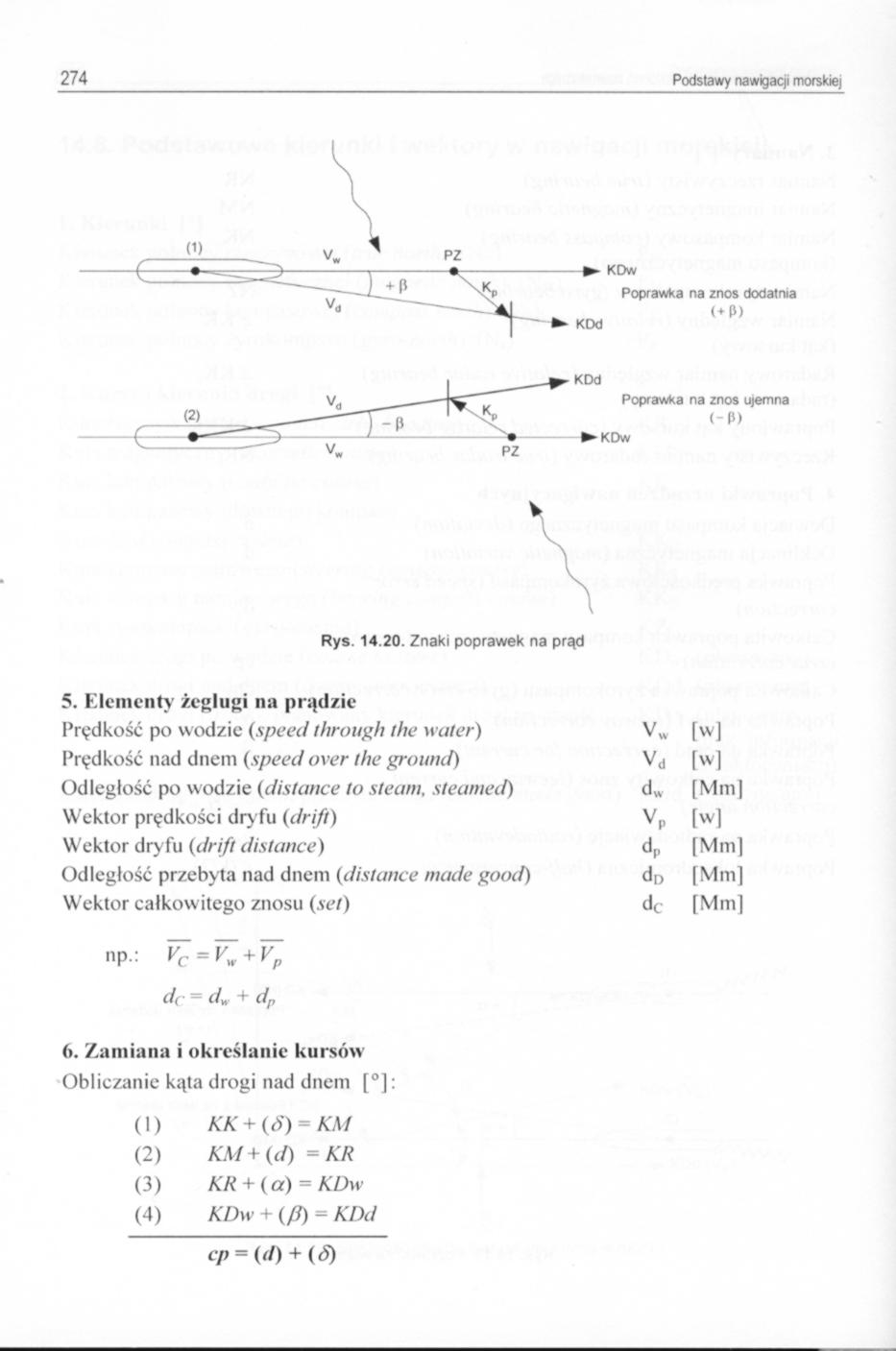
Rys. 14.20. Znaki poprawek na prąd
|
5. Elementy żeglugi na prądzie | ||
|
Prędkość po wodzie (speed through the water) |
vw |
[w] |
|
Prędkość nad dnem (speed over the gro mul) |
v„ |
M |
|
Odległość po wodzie (dislance to steam, steamed) |
dw |
[Mm| |
|
Wektor prędkości dryfu (drift) |
vP |
[w] |
|
Wektor dryfu (drift distance) |
d,. |
[Mm] |
|
Odległość przebyta nad dnem (distance madę good) |
do |
[Mm] |
|
Wektor całkowitego znosu (set) |
dc |
[Mm| |
np.: Vc = V„+Vp
dc dw + dp
6. Zamiana i określanie kursów
Obliczanie kąta drogi nad dnem [°]:
(1) KK + (S) = KM
(2) KM + (d) = KR
(3) KR + (a) = KDw
(4) KDw + (p) = KDd
cp = (d) + (5)
Wyszukiwarka
Podobne podstrony:
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
360 (8) 360 Podstawy nawigaqi morskiej Rys. 18.14b. Trasa mimmalnoczasowa na okres 5 dni, dla izochr
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
300 (15) 300 Podstawy nawigaqi morskiej15.5. Zalety radaru i jego ograniczenia Urządzenia radarowe,
304 (15) 304 Podstawy nawigacji morskiej • obserwowanie przebytej drogi według rad
328 (15) 328 Podstawy nawigacji morskiej 7) charakterystyki na wietrze; dryf wiatr
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
250 (15) 250 Podstawy nawigacji morskiej Błędy systematyczne można usunąć przez zastosowanie protrak
252 (15) 252 Podstawy nawigaqi morskiej Dobre wyniki dokładności pozycji można uzyskać, gdy trzy obi
254 (15) 254 Podstawy nawigaqi morskiej Można wymienić wiele innych możliwości określania pozycji w
306 (12) 306 Podstawy nawigacji morskiej16.3. Wykonywanie planu pilotowania Niezal
396 (7) 396 Podstawy nawgaqi morskie) Rys. 19.20. Przykłady typowych krzywych ptywu mieszanego [11]
260 (14) 260 Podstawy nawigaqi morskiej Wiatr działający na statek będący chwilowo w równowadze (rys
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
więcej podobnych podstron