256 (15)
256 Podstawy nawigacji morskiej
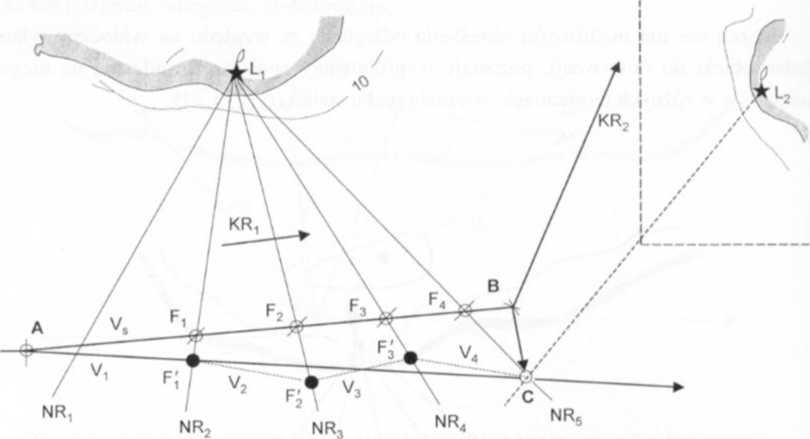
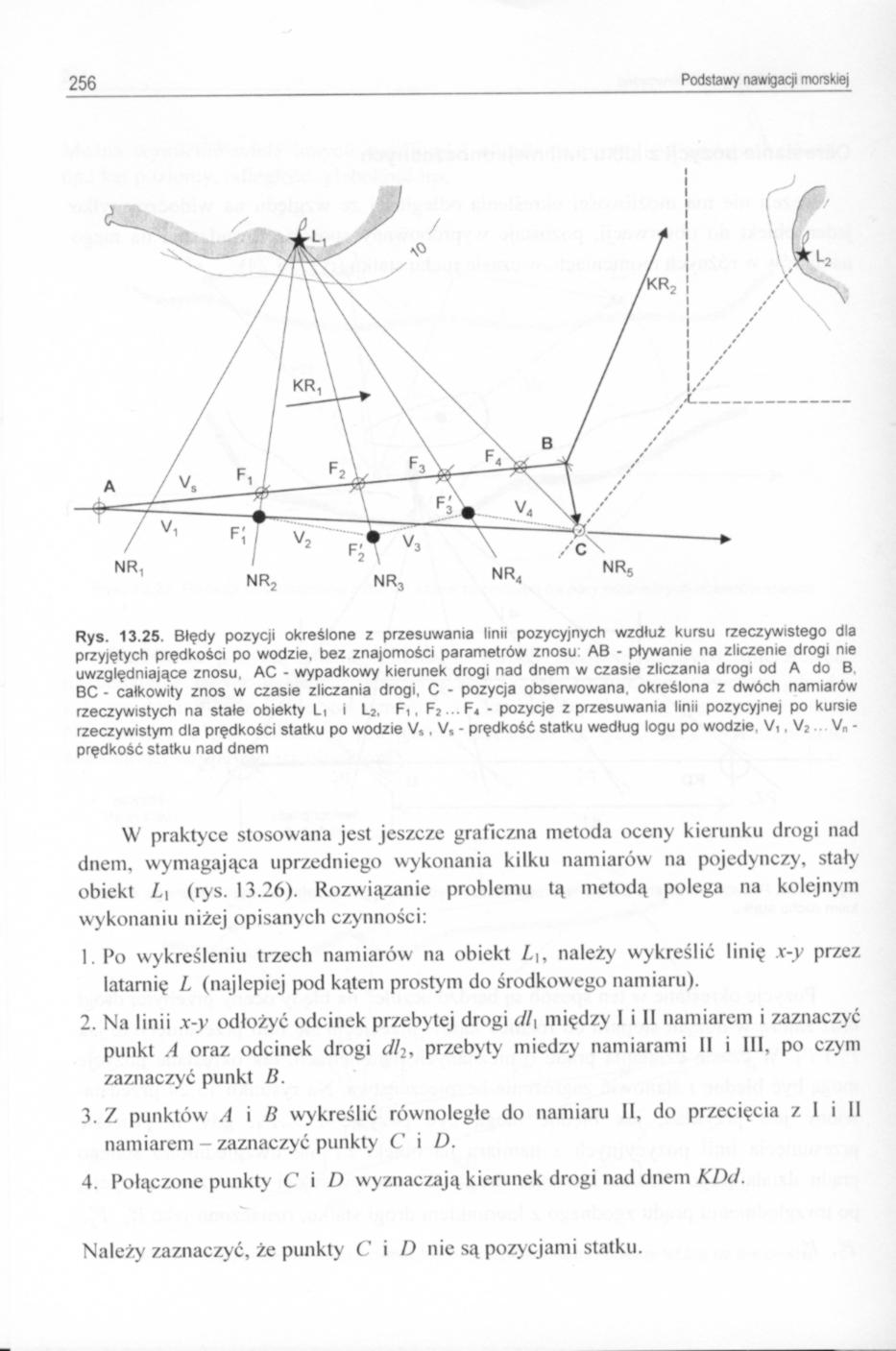
Rys. 13.25. Błędy pozycji określone z przesuwania linii pozycyjnych wzdłuz kursu rzeczywistego dla przyiętych prędkości po wodzie, bez znajomości parametrów znosu AB - pływanie na zliczenie drogi me uwzględniające znosu. AC - wypadkowy kierunek drogi nad dnem w czasie zliczania drogi od A do B BC - całkowity znos w czasie zliczania drogi. C - pozycja obserwowana, określona z dwóch namiarów rzeczywistych na stałe obiekty Li i L*. F,, F2 F4 - pozycje z przesuwania linii pozycyjnej po kursie rzeczywistym dla prędkości statku po wodzie V». V, - prędkość statku według logu po wodzie. V,, V? V„ -prędkość statku nad dnem
W praktyce stosowana jest jeszcze graficzna metoda oceny kierunku drogi nad dnem. wymagająca uprzedniego wykonania kilku namiarów na pojedynczy, stały obiekt L\ (rys. I3.26). Rozwiązanie problemu tą metodą polega na kolejnym wykonaniu niżej opisanych czynności:
1. Po wykreśleniu trzech namiarów na obiekt L\, należy wykreślić linię x-y przez latarnię L (najlepiej pod kątem prostym do środkowego namiaru).
2. Na linii x-y odłożyć odcinek przebytej drogi <//1 między liii namiarem i zaznaczyć punkt A oraz. odcinek drogi dl2, przebyty miedzy namiarami II i 111, po czym zaznaczyć punkt D.
3. Z punktów A i B wykreślić równoległe do namiaru II, do przecięcia z I i II namiarem - zaznaczyć punkty C i D.
4. Połączone punkty C i D wyznaczają kierunek drogi nad dnem KDd.
Należy zaznaczyć, że punkty C i D nie są pozycjami statku.
Wyszukiwarka
Podobne podstrony:
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
254 (15) 254 Podstawy nawigaqi morskiej Można wymienić wiele innych możliwości określania pozycji w
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
300 (15) 300 Podstawy nawigaqi morskiej15.5. Zalety radaru i jego ograniczenia Urządzenia radarowe,
304 (15) 304 Podstawy nawigacji morskiej • obserwowanie przebytej drogi według rad
328 (15) 328 Podstawy nawigacji morskiej 7) charakterystyki na wietrze; dryf wiatr
360 (8) 360 Podstawy nawigaqi morskiej Rys. 18.14b. Trasa mimmalnoczasowa na okres 5 dni, dla izochr
250 (15) 250 Podstawy nawigacji morskiej Błędy systematyczne można usunąć przez zastosowanie protrak
252 (15) 252 Podstawy nawigaqi morskiej Dobre wyniki dokładności pozycji można uzyskać, gdy trzy obi
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
246 (18) 246 Podstawy nawigacji morskiej ___ KDd Rys. 13.11. Granice niebezpieczeństwa wyznaczone
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
310 (11) 310 Podstawy nawigacji morskiej oś nabiezmka Rys. 16.4. System nabiezmka z dwóch par staw
więcej podobnych podstron