296 (13)
296 Podstawy nawigaqi morskiej
Wybór czasu trwania impulsów może być dokonywany w radarach posiadających przełącznik czasu trwania impulsów. Praca na krótkich impulsach pozwala uzyskać dużą rozróżnialność odległościową, ale zmniejsza maksymalny zasięg radaru. Impulsy krótkie powinny być stosowane podczas niekorzystnych warunków hydrometeorologicznych. Praca radaru na zakresie długich czasów trwania impulsów zwiększa maksymalny zasięg, ale daje pogorszenie rozróżnialności odległościowej.
Błędy pomiaru kierunku radarem
Przed rozpoczęciem pomiaru kierunku konieczne jest skalibrowanie radaru
w zakresie ułożenia kreski kursowej.

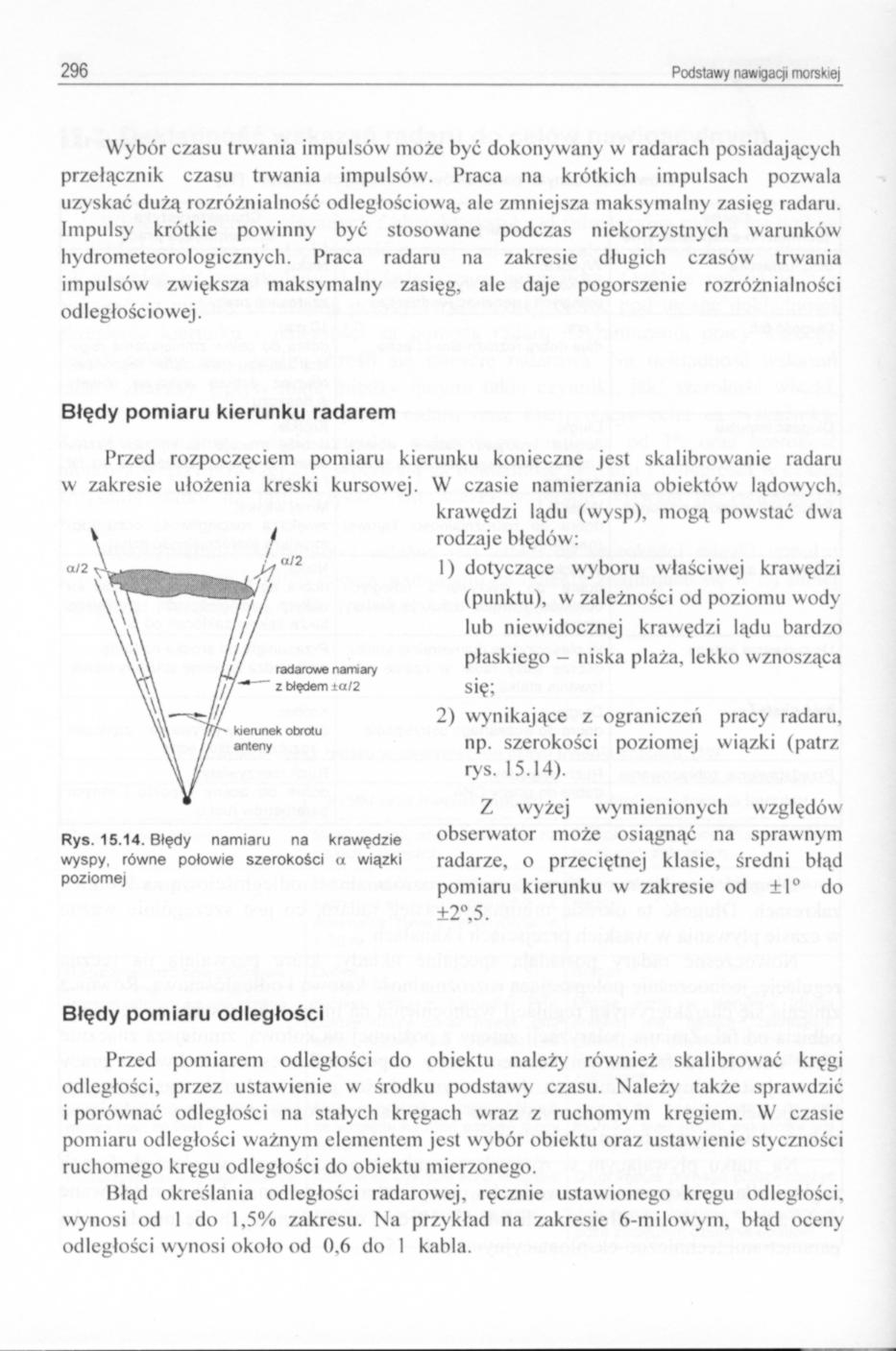
Rys. 15.14. Błędy namiaru na krawędzie wyspy, równe połowie szerokości a wiązki poziomej
W czasie namierzania obiektów lądowych, krawędzi lądu (wysp), mogą powstać dwa rodzaje błędów:
1) dotyczące wyboru właściwej krawędzi (punktu), w zależności od poziomu wody lub niewidocznej krawędzi lądu bardzo płaskiego - niska plaża, lekko wznosząca się;
2) wynikające z ograniczeń pracy radaru, np. szerokości poziomej wiązki (patrz rys. I5.I4).
Z wyżej wymienionych względów obserwator może osiągnąć na sprawnym radarze, o przeciętnej klasie, średni błąd pomiaru kierunku w zakresie od ±l° do
±2°,5.
Błędy pomiaru odległości
Przed pomiarem odległości do obiektu należy również skalibrować kręgi odległości, przez ustawienie w środku podstawy czasu. Należy także sprawdzić i porównać odległości na stałych kręgach wraz z ruchomym kręgiem. W czasie pomiaru odległości ważnym elementem jest wybór obiektu oraz ustawienie styczności ruchomego kręgu odległości do obiektu mierzonego.
Błąd określania odległości radarowej, ręcznie ustawionego kręgu odległości, wynosi od I do l,5% zakresu. Na przykład na zakresie 6-milowym, błąd oceny odległości wynosi około od 0.6 do l kabla.
Wyszukiwarka
Podobne podstrony:
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
320 (13) 320 Podstawy nawigacji morskiej z metod stosowanych w automatyce, przy rozpatrywaniu proces
336 (13) 336 Podstawy nawigaqi morskiej Wiele instytutów badawczych na świecie od lal zajmuje się pr
338 (13) 338 Podstawy nawigacji morskiej 3. Minimalizacja uszkodzeń sztormowych ła
352 (13) 352 Podstawy nawigaqi morskiej 9. Przeanalizowanie informacji klimatyczny
388 (9) 388 Podstawy nawigacji morskiej Odstęp czasu między momentami dwóch bezpośrednio po sobie na
img097 97 gdzie At = kl x l*,8x raa sens maksymalnej dewiacji czasu trwania impulsu. Powinny być spe
422 (7) 422 Podstawy nawigacji morskiej19.13. Prognozy prądów według Admiralty Tide Tables (ATT) W t
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
246 (18) 246 Podstawy nawigacji morskiej ___ KDd Rys. 13.11. Granice niebezpieczeństwa wyznaczone
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
więcej podobnych podstron