246 (18)
246 Podstawy nawigacji morskiej
___
KDd
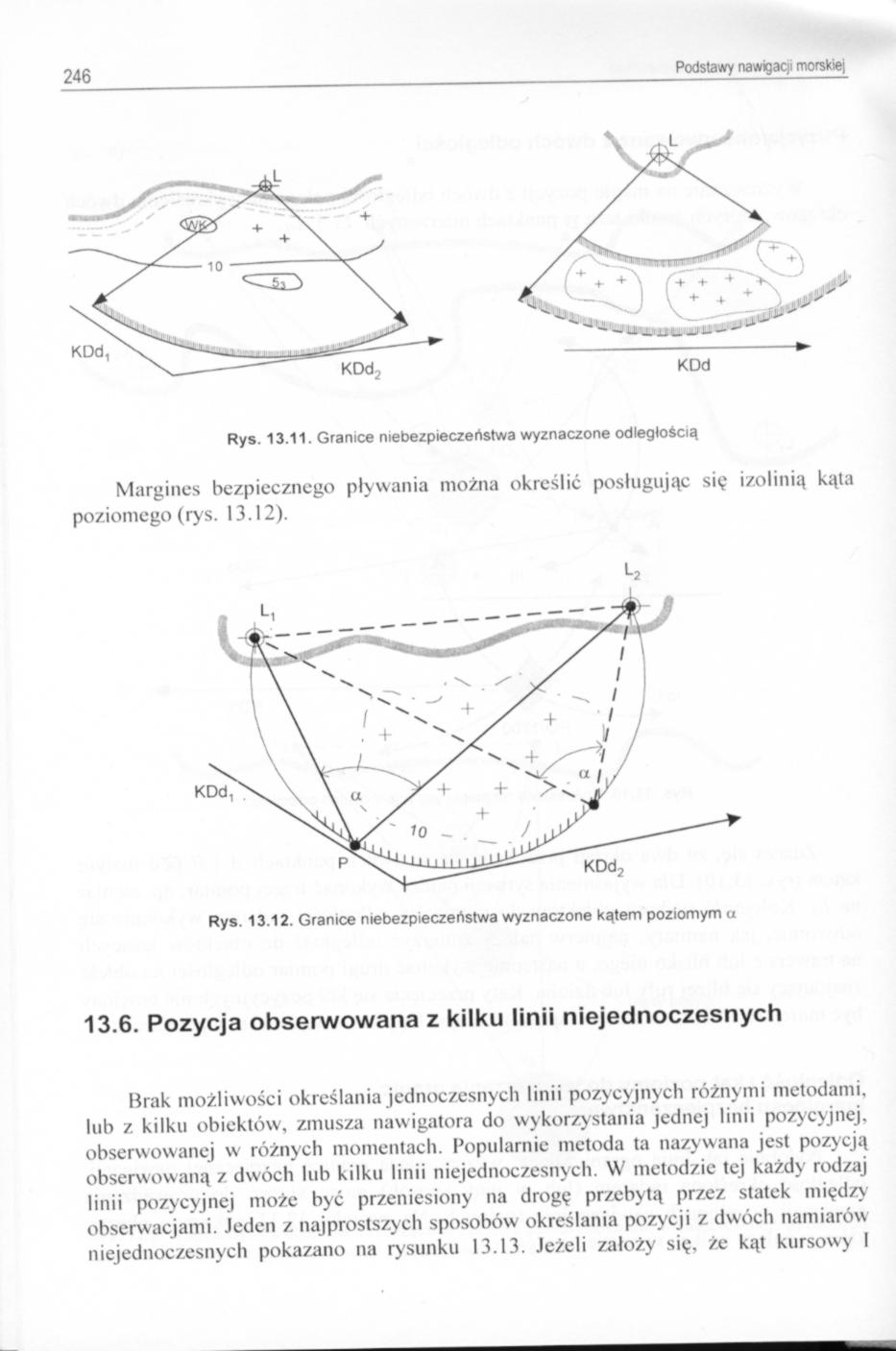
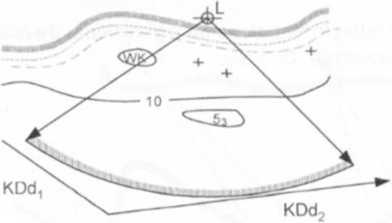
Rys. 13.11. Granice niebezpieczeństwa wyznaczone odległością
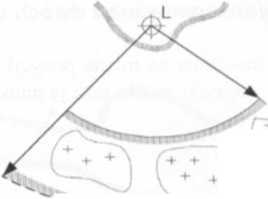
Margines bezpiecznego pływania można określić posługując się izolinią kąta poziomego (rys. 13.12).
L2
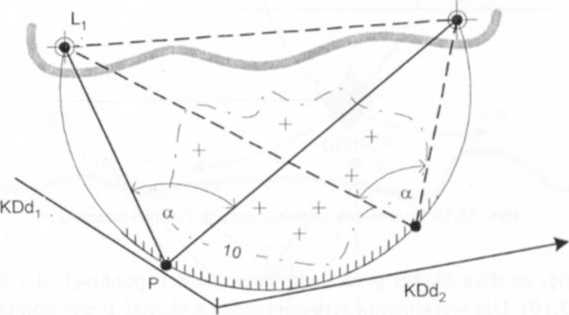
Rys. 13.12. Granice niebezpieczeństwa wyznaczone kątem poziomym u
13.6. Pozycja obserwowana z kilku linii niejednoczesnych
Brak możliwości określania jednoczesnych linii pozycyjnych różnymi metodami, lub z kilku obiektów, zmusza nawigatora do wykorzystania jednej linii pozycyjnej, obserwowanej w różnych momentach. Popularnie metoda ta nazywana jest pozycją obserwowaną z dwóch lub kilku linii niejednoczesnych. W metodzie tej każdy rodzaj linii pozycyjnej może być przeniesiony na drogę przebytą przez statek między obserwacjami. Jeden z najprostszych sposobów określania pozycji z dwóch namiarów niejednoczesnych pokazano na rysunku 13.13. Jeżeli założy się. że kąt kursowy I
Wyszukiwarka
Podobne podstrony:
406 (6) 406 Podstawy nawigacji morskiej 9° W Rys. 19.28. Amfidromiczna mapka pływów Morza Północnego
240 (18) 240 Podstawy nawigacji morskiej Wartość wektora r zejścia statku z osi toru zależy od dwóch
394 (7) 394 Podstawy nawigaqi morskie) A7 = *(l2h25m) (19.11) gdzie: k - liczba całkowita. Opóźnieni
360 (8) 360 Podstawy nawigaqi morskiej Rys. 18.14b. Trasa mimmalnoczasowa na okres 5 dni, dla izochr
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
310 (11) 310 Podstawy nawigacji morskiej oś nabiezmka Rys. 16.4. System nabiezmka z dwóch par staw
437 (5) 20 Podstawy planowania nawigacji morskiej 437 Rys. 20.7. Fragment szkicu w brulionie nawigac
443 (5) 20. Podstawy planowania nawigacji morskiej 443 Rys. 20.10. Schemat uzupełniający do procesu
340 (14) 340 Podstawy nawigacji morskiej Z rysunku 18.4 wynika, że pole falowania jest przesunięte (
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
400 (6) 400 Podstawy nawigaqi morskiej fi ORBITA ZIEMI Rys. 19.22. Wptyw fazy Księżyca na wysokość s
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
260 (14) 260 Podstawy nawigaqi morskiej Wiatr działający na statek będący chwilowo w równowadze (rys
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
więcej podobnych podstron