360 (8)

360 Podstawy nawigaqi morskiej

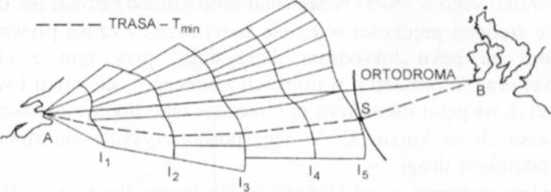
Rys. 18.14b. Trasa mimmalnoczasowa na okres 5 dni, dla izochron od h do ls
Zakładając, że do celu pozostało koło I/3 odległości AB, z punktu docelowego B(tn) należy zatoczyć luk styczności do najbardziej wysuniętego punktu na izochronic I\. Po połączeniu punktów Aj*, Aju, Aj* z punktem docelowym B, uzyskuje się trajektorię minimalnoczasową (rys. 18.14).
Typowy przykład trasy optymalnej na Północnym Atlantyku pokazano na rysunku I8.l4b*
18.14. Zasady rozwiązywania optymalnej trajektorii ruchu statku metodą programowania dynamicznego
18.14.1. Uwarunkowania metody programowania dynamicznego
Programowanie dynamiczne rozwinięte przez R. Bellmana (1950) może być stosowane do rozwiązywania optymalnej trajektorii w skali ogólnej. Podstawy teorii bellmanowskiej można przedstawić następująco: „Dowolna zasada polityki optymalnej
Wyszukiwarka
Podobne podstrony:
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
390 (7) 390 Podstawy nawigacji morskiej a) b) Rys. 19.13. Wysoka woda na równiku a) dla deklinacji K
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
340 (14) 340 Podstawy nawigacji morskiej Z rysunku 18.4 wynika, że pole falowania jest przesunięte (
244 (17) 244 Podstawy nawigaqi morskieja) b) Rys. 13.9. Analiza wyboru obiektów do określania pozycj
256 (15) 256 Podstawy nawigacji morskiej Rys. 13.25. Błędy pozycji określone z przesuwania linii poz
266 (16) 266 Podstawy nawigacji morskiei Rys. 14.11. Metoda wyznaczania KDw i poprawki p° w żegludze
306 (12) 306 Podstawy nawigacji morskiej16.3. Wykonywanie planu pilotowania Niezal
234 (19) 234 Podstawy nawigacji morskiej południka odniesienia, liczony zgodnie z ruchem wskazówek z
246 (18) 246 Podstawy nawigacji morskiej ___ KDd Rys. 13.11. Granice niebezpieczeństwa wyznaczone
310 (11) 310 Podstawy nawigacji morskiej oś nabiezmka Rys. 16.4. System nabiezmka z dwóch par staw
400 (6) 400 Podstawy nawigaqi morskiej fi ORBITA ZIEMI Rys. 19.22. Wptyw fazy Księżyca na wysokość s
406 (6) 406 Podstawy nawigacji morskiej 9° W Rys. 19.28. Amfidromiczna mapka pływów Morza Północnego
240 (18) 240 Podstawy nawigacji morskiej Wartość wektora r zejścia statku z osi toru zależy od dwóch
260 (14) 260 Podstawy nawigaqi morskiej Wiatr działający na statek będący chwilowo w równowadze (rys
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
więcej podobnych podstron